- Как сделать робот-пылесос своими руками
- Описание самодельного робота пылесоса
- Теоретические аспекты проблемы
- Способы обеспечения движения, уборки и питания робота-пылесоса
- Теоретические аспекты проблемы
- Способы обеспечения движения, уборки и питания робота-пылесоса
- Подготовка к практической реализации проекта
- Как сделать робот-пылесос своими руками — 2 идеи сборки
- Материалы для сборки
- Идея №1: робот-пылесос из картона
- Где взять и как залить прошивку
- Тестирование изделия
- Варианты модернизации
- Сборка
- Робот пылесос своими руками
- Как сделать робот-пылесос?
- Описание самодельного робота пылесоса
- Особенности изготовления робота-пылесоса дома
- Теоретические аспекты
- Как сделать чертёж
- Особенности проведения сборки
Для фиксации печатных плат, отдельных узлов в корпусе капота можно использовать термоклеевой пистолет с клеевыми карандашами. Однако саморезы являются более надежными и гибкими. Механическая часть сборки не представляет сложности.
Как сделать робот-пылесос своими руками
Популярность бытовых роботов-уборщиков растет с каждым днем. Это оправдано тем, что эти устройства способны поддерживать чистоту полов, не отнимая у вас много времени. Основное отличие их от управляемых человеком братьев и сестер заключается в том, что они очищают поверхность, перемещаются и ориентируются в помещении. Это достигается благодаря наличию специальных датчиков, которые контролируют изменение режима, движение и зарядку вакуума.
Основная проблема заключается в том, что вывести робот-уборщик на рынок сегодня очень сложно. Правильная модель доступна не везде, а ценовая политика некоторых поставщиков подходит не всем. Но не отчаивайтесь. У вас всегда есть возможность создать робота-пылесоса самостоятельно. Конечно, изготовление своими руками и в домашних условиях — это очень длительный процесс, требующий терпения, определенного количества материалов и инструментов, а также умения работать с подобной техникой. План по созданию робота-пылесоса в домашних условиях понятен даже непрофессионалу. Однако при разработке механизма такого типа необходимо понимать все нюансы предстоящей операции. В противном случае вы только зря потратите время и деньги.

Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, идеально подходящий для очистки поверхности пола в вашем доме, вам необходимо следовать всем правилам, перечисленным в схеме сборки, представленной в следующем разделе.
Если вы все сделаете правильно, у вас получится модель, соответствующая данному описанию:
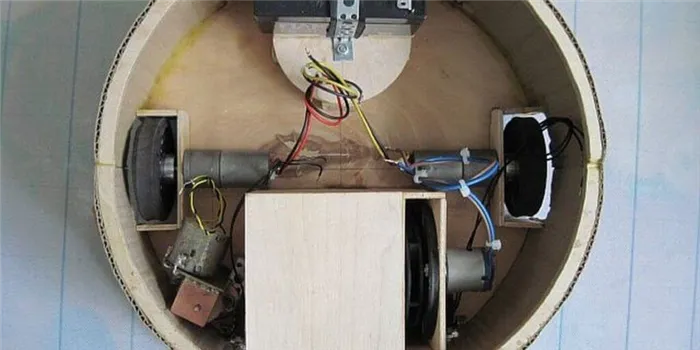
- Диаметр блока составляет 30 см, высота — 9 см. Корпус изготовлен из вспененного поливинилхлорида. При этом толщина самого корпуса составляет 6 мм,
- Бампер оснащен 4 датчиками, которые используются для определения положения пылесоса в помещении. Также подключены два коммутатора на случай непредвиденных коллизий. Края имеют резиновые накладки во избежание случайного контакта с мебелью,
- Поддон для сбора пыли и мусора изготовлен из ПВХ толщиной 4 мм. Поддон для сбора пыли и мусора изготовлен из 2 коммерчески доступных тканей, которые можно приобрести в любом хозяйственном магазине. Крышка, которая защищает содержимое контейнера, крепится к основанию с помощью магнитов,
- Турбина сделана из тонких пластиковых листов, фрагментов компьютерных плат и поливинилхлорида,
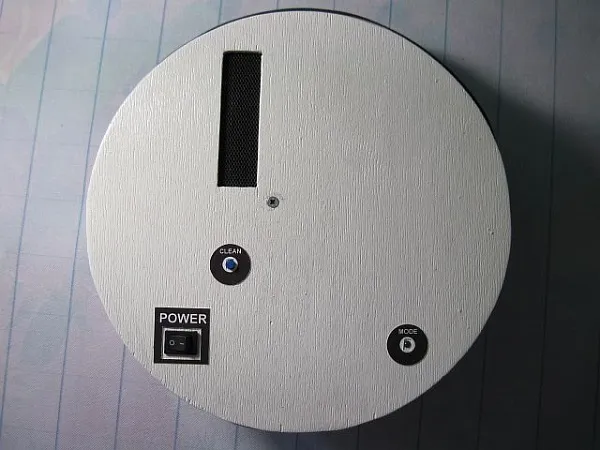
- Верхняя крышка устройства крепится с помощью клея,

- Инфракрасные датчики имеют 4 выхода для подключения к системе Arduino. Нормальное рабочее состояние означает выход логической единицы, а состояние, в котором активирован хотя бы один из датчиков системы, — логического нуля,
- Если ИК-датчик не активирован, но метла все равно наезжает на препятствие, ее бампер ударяется о выключатель, в результате чего устройство откатывается на несколько сантиметров назад. Затем происходит обратный ход, и работа возобновляется. Выключатели должны быть достаточно прочными, чтобы вовремя вернуть бампер в исходное положение,
- Двигатель, отвечающий за движение передней щетки, подключен к Arduino через MOSFET. Когда робот-пылесос находится в движении, щетка вращается достаточно медленно, чтобы пыль, грязь и мусор не разлетались по комнате, а собирались и всасывались в насадку. Если робот расположен возле стены или угла, он быстрее собирает пыль и грязь, поскольку большинство пыли и грязи скапливается вдоль плинтусов,
- Пылесос работает от 4 литий-ионных аккумуляторов и преобразователя переменного/постоянного тока. Каждая пара указанных литий-ионных батарей соединена последовательно,
- основание устройства изготовлено из высокопрочной фанеры,
- конструкция включает 3 колеса с шарикоподшипниками,
- Все щетки робота-пылесоса сделаны из достаточно жесткой лески.
Чтобы собрать робот-пылесос своими руками, достаточно приобрести минимально необходимые теоретические знания и иметь набор легкодоступных комплектующих. Такой помощник поддерживает чистоту полов в помещениях и экономит время на уборку. Благодаря наличию специальных датчиков, механизм не только самостоятельно перемещается в помещении, но и ориентируется в нем. Процесс строительства в домашних условиях потребует времени и терпения, но система создания достаточно проста и доступна даже любителям, а стоимость ее значительно ниже цены рыночных устройств.
Теоретические аспекты проблемы
Самодельщики вывели практические требования к роботизированным метлам, которые необходимо соблюдать при их изготовлении. Соблюдение этих правил приведет к тому, что машина будет пригодна для дальнейшего использования. Список основных правил выглядит следующим образом:
- Рекомендуется построить робота в форме небольшого цилиндра,
- Для того чтобы робот мог поворачиваться на месте, колеса должны быть расположены в соответствии с их диаметром,
- дополнительное рулевое колесо не требуется,
- Робот должен собирать мусор в мусорный бак, который можно легко извлечь,
- Робот должен быть оснащен контактным буфером, покрывающим не менее половины его окружности,
- Робот должен заряжаться через зарядное устройство без разборки,
- Центр тяжести робота лучше всего располагать на колесах, но можно и рядом с ними,
- Оптимальная скорость составляет от 25 до 35 см/сек,
- двигатели работают совместно с подпружиненными шестернями.
Можно выбрать модели с шаговыми двигателями, которые могут управляться программным обеспечением без редукторов.
Способы обеспечения движения, уборки и питания робота-пылесоса
Робот обычно движется двумя способами: по спирали (от центра наружу) и в форме квадрата. Пространственные шаблоны также могут быть записаны отдельно в микроконтроллеры.
Пространственная ориентация метлы и избегание препятствий обеспечивается встроенными контактными и инфракрасными датчиками, которые образуют систему обратной связи. Инфракрасные датчики обнаруживают движение, измеряя расстояние до стен, препятствий, перепадов высот и т.д. Контактные датчики на бамперах активируются при наезде на препятствия (подробнее о том, как работают эти датчики, читайте в нашей статье о роботизированных метлах).
Автоматический пылесос с автономным питанием, конечно, не развивает такую же силу всасывания, как портативное устройство. Практические испытания показали, что маленькая щетка в сочетании с всасывающей турбиной очень эффективна. Для уборки в углах передняя часть пылесоса имеет 2 щетки, которые при работе сметают грязь в основную часть.
Роботизированная система может работать с различными батареями с напряжением на клеммах 12 В (18 В) и емкостью 7 А*ч. Зарядка может осуществляться при непосредственном контакте или беспроводным способом. Использование последнего увеличивает стоимость запасных частей.
Возвращение робота на зарядную станцию — сложная задача, которую можно решить, установив маячок.
Отломите родные ребра от радиатора и прикрепите к его ротору выхлопную турбину. Важно закрепить турбину точно посередине, иначе возникнет дисбаланс и вибрация.
Теоретические аспекты проблемы
Самодельщики вывели практические требования к роботизированным метлам, которые необходимо соблюдать при их изготовлении. Соблюдение этих правил приведет к тому, что машина будет пригодна для дальнейшего использования. Список основных правил выглядит следующим образом:
- Рекомендуется построить робота в форме небольшого цилиндра,
- Для того чтобы робот мог поворачиваться на месте, колеса должны быть расположены в соответствии с их диаметром,
- дополнительное рулевое колесо не требуется,
- Робот должен собирать мусор в мусорный бак, который можно легко извлечь,
- Робот должен быть оснащен контактным буфером, покрывающим не менее половины его окружности,
- Робот должен заряжаться через зарядное устройство без разборки,
- Центр тяжести робота лучше всего располагать на колесах, но можно и рядом с ними,
- Оптимальная скорость составляет от 25 до 35 см/сек,
- двигатели работают совместно с подпружиненными шестернями.
Можно выбрать модели с шаговыми двигателями, которые могут управляться программным обеспечением без редукторов.
Способы обеспечения движения, уборки и питания робота-пылесоса
Робот обычно движется двумя способами: по спирали (от центра наружу) и в форме квадрата. Пространственные шаблоны также могут быть записаны отдельно в микроконтроллеры.
Пространственная ориентация метлы и избегание препятствий обеспечивается встроенными контактными и инфракрасными датчиками, которые образуют систему обратной связи. Инфракрасные датчики обнаруживают движение, измеряя расстояние до стен, препятствий, перепадов высот и т.д. Контактные датчики на бамперах активируются при наезде на препятствия (подробнее о том, как работают эти датчики, читайте в нашей статье о роботизированных метлах).
Автоматический пылесос с автономным питанием, конечно, не развивает такую же силу всасывания, как портативное устройство. Практические испытания показали, что маленькая щетка в сочетании с всасывающей турбиной очень эффективна. Для уборки в углах передняя часть пылесоса имеет 2 щетки, которые при работе сметают грязь в основную часть.
Роботизированная система может работать с различными батареями с напряжением на клеммах 12 В (18 В) и емкостью 7 А*ч. Зарядка может осуществляться при непосредственном контакте или беспроводным способом. Использование последнего увеличивает стоимость запасных частей.
Возвращение робота на зарядную станцию — сложная задача, которую можно решить, установив маячок.
Каждая автоматизированная модель строится вокруг контроллера (мозга системы). Поэтому необходимо изучить язык программирования, чтобы уметь вводить алгоритм команд. Вам также следует обратить внимание на интуитивную природу командного интерфейса, который значительно облегчает процесс. И микроконтроллер, и используемые датчики часто имеют стандартные разъемы для клемм, поэтому пайка требуется редко.
Подготовка к практической реализации проекта
Рассмотрим применение описанных выше принципов к платформе Arduino Mega 2560. Процесс строительства состоит из нескольких этапов:
- Подготовка инструментов и материалов,
- Подготовка и заготовка материалов, подготовка инструментов и оборудования, строительство корпуса с колесами и отсеком для отходов, пылесборника и турбины,
- установка датчиков и микроконтроллера, двигателей с редукторами, аккумулятора, щеток,
- выполнение электрических соединений,
- Ввод программы в Arduino, определение согласованности датчиков,
- Проверка функциональности робота-пылесоса и его способности к самозарядке.
Концепция реализуется с использованием следующих материалов и инструментов:
- Контроллер Arduino — 1 штука, с драйверами,
- Фанерный лист (или картон) — 1 м2,
- картон (картон, картонная коробка, картонная коробка, картонная коробка, картонная коробка, картонная коробка — 3 шт,
- Источник питания — 4 батареи 18 В, индикатор заряда для них, зарядное устройство,
- инфракрасные датчики — 4 шт, контактные датчики — 2 шт,
- Моторы: 1 шт. для турбины и 1 шт. для щетки; 2 мотор-редуктора обеспечивают движение,
- корпус из поливинилхлорида — 1 шт,
- клей — 1 упаковка, саморезы — 10 штук, клейкая лента — 1 штука, набор магнитов,
- набор отверток и бит, плоскогубцы, кусачки, карандаш, линейка, шуруповерт, лобзик.
- Автомобильный пылесос, как следует из названия, предназначен для уборки салона автомобиля. Его компактные размеры обеспечивают доступ в самые труднодоступные места. Некоторые пылесосы могут всасывать жидкости, что особенно полезно зимой, когда на ковре стоят лужи талого снега.
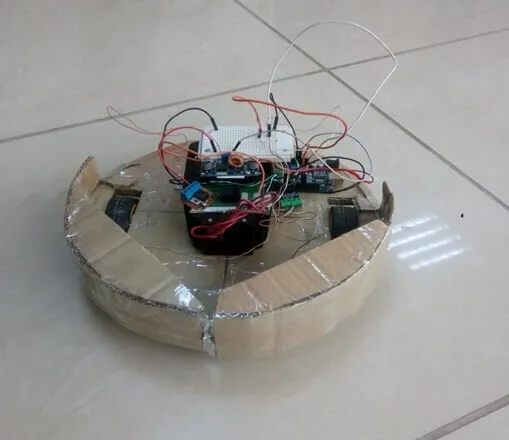
Современный темп жизни не всегда позволяет содержать дом в чистоте. Именно здесь на помощь приходят современные технологии. Робот-пылесос был изобретен более 15 лет назад. Его типичный вид напоминает большую шайбу, которая перемещается по комнате, собирая мусор по заданному алгоритму или случайным образом (пока не наткнется на что-нибудь). Вот 2 пошаговые инструкции по созданию робота-пылесоса своими руками.
Как сделать робот-пылесос своими руками — 2 идеи сборки
Чтобы собрать робот-пылесос, необходимо разобраться в его компонентах. Давайте по порядку. Он должен перемещаться в пространстве, поэтому вам нужны двигатели, от 2 до 4 в зависимости от окончательного дизайна, и возможность изменять направление и скорость вращения, поэтому вам нужна печатная плата для управления двигателями. Если вы используете двигатели постоянного тока, вам понадобится печатная плата с 4 транзисторами (мост H).
Материалы для сборки
Самостоятельно построенный робот-пылесос должен обнаруживать столкновения со стенами и мебелью. Для этого на «бампере» должны быть закреплены датчики препятствий и концевые выключатели. Ему также необходим рабочий орган — сам пылесос. Он должен быть рассчитан на постоянный ток низкого напряжения (например, 12 В).
В дополнение к пылесосу необходима подвижная (вращающаяся) щетка, которая очищает поверхность, собирает ворс на полу и подметает грязь. Для этого требуется один или два двигателя.
Система для управления всем этим. Самый простой вариант — это Arduino. Для этой задачи подходит любая из плат Nano или Pro Mini.
Основание робота сделано из картона. Лучше всего склеить несколько слоев вместе и расположить волокна вертикально. Для технического наполнения необходим ряд аксессуаров:
Идея №1: робот-пылесос из картона
Любая плата Arduino.
- Любая плата Arduino или простая макетная плата, в принципе можно обойтись и без нее, просто все склеить.
- Любая доска, вы можете просто сделать доску, просто сделайте ее сами.
- Турбина капота.
- Небольшой мотор холодильника или компьютер.
- Двигатели с шестернями и колесами.
- Блок управления двигателем.
- Кабели для подключения цепей.
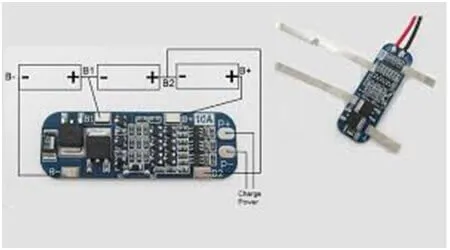
- Аккумуляторы и контроллер заряда.
- Питание робота должно осуществляться от 3 литиевых батарей. Каждый из них имеет напряжение 3,7 В. Для их зарядки необходим контроллер. Примером может служить тот, что показан на рисунке:
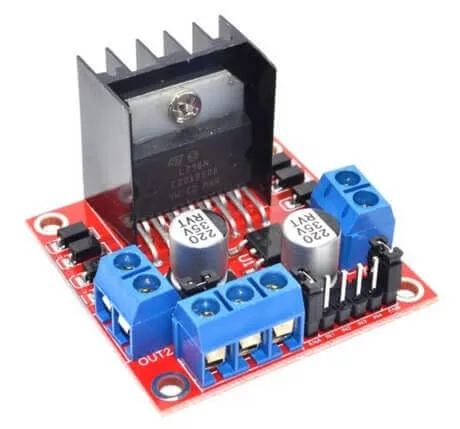
Для управления приводными двигателями робота подходит модуль с микросхемой L298. Схема представляет собой Н-мост, который можно собрать самостоятельно из отдельных компонентов, но надежнее купить готовую плату. С его помощью можно управлять скоростью и направлением вращения робота-пылесоса.
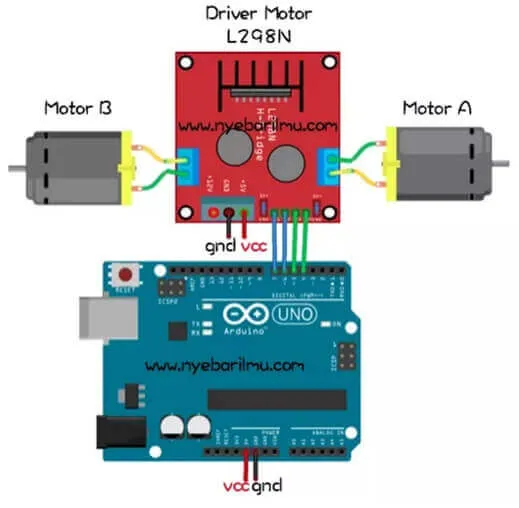
Клемма ENA или ENB обеспечивает ШИМ-сигнал для регулировки скорости. Противоположные сигналы IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя используются для установки направления вращения. В этом случае, если на клемме IN1 установлена логическая единица, а на клемме IN2 — логический ноль, двигатель будет вращаться в одном направлении; чтобы изменить направление, нужно поменять 1 на 0. Вам нужно собрать его с Arduino в соответствии с этим рисунком (вы можете использовать любые контакты, указанные в скетче).
Рисование на Arduino
Далее нужно сделать картонную основу и прикрепить к ней колеса. Это должно выглядеть примерно так:
Картонная основа
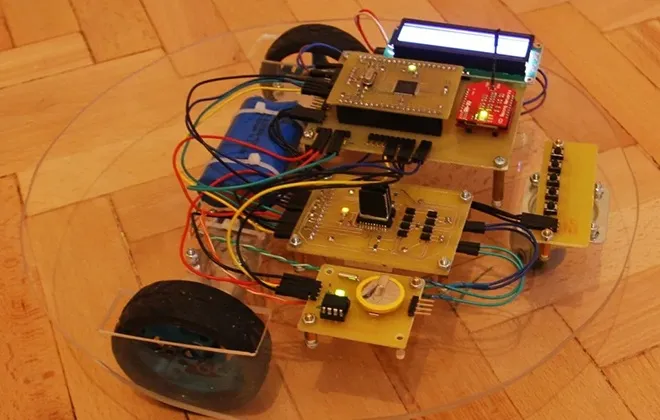
Вот вид снизу. Два приводных колеса с угловым редуктором и вращающимся колесом:
Теперь необходимо собрать шестерни, которые установлены на опорной плите. Диаметр опорной пластины должен быть около 30 см, чтобы в нее поместилась и электроника, и сам блок навеса.
Вместо дальномера можно также использовать версию с бампером, подключенным к концевым выключателям. При появлении препятствия система управления подает сигнал об изменении направления движения.
Вы также можете самостоятельно изготовить контактные буферы; для этого вам понадобится тонкий, но жесткий кабель, например, из витой проволоки. Для этого сформируйте контактную площадку из алюминиевой фольги внутри бампера и подключите кабель, как показано ниже. При столкновении робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам нужно только отрегулировать расстояние между проводом и листом, чтобы достичь желаемой чувствительности и избежать ложных срабатываний. Вы подаете на лист 5 В, а провод идет на вход Arduino, который подтягивается к минусу через резистор в несколько кОм.
Система, которая контролирует все. Самый простой вариант — это Arduino. Любая из плат подходит для этой задачи, но версия nano или pro-mini удобна с точки зрения размера.
Основание робота сделано из картона. Лучше всего склеить несколько слоев вместе и расположить волокна вертикально. Для технического наполнения необходим ряд аксессуаров:
Где взять и как залить прошивку
В одном из решений автор любезно представил программу для самой простой и грязной уборки. В целом, Arduino — это платформа, на которой энтузиасты разрабатывают собственные решения для своих нужд. Поэтому есть два варианта: Написать программное обеспечение самостоятельно (если вы умеете программировать) или попросить кого-то о помощи и получить готовое программное обеспечение.
Вы не сможете сделать это без базовых знаний об Arduino, компьютерах и их взаимодействии. Тем, кто не уверен в своих силах, лучше не рисковать. Существует несколько способов синхронизации микроконтроллера Arduino и добавления программного обеспечения:
Использование среды разработки Arduino IDE,
- с помощью программирующего устройства,
- подключение к другой плате Arduino.
- Первый способ — скачать (или использовать) программу Arduino IDE, которая работает на большинстве современных операционных систем — Windows, Linux, Mac OS. Прежде чем приступить к работе, крайне желательно понять, что именно пытаются сделать.
Не рекомендуется делать что-либо с Arduino вслепую, методом проб и ошибок. Лучше заказать готовую и освещенную доску. Также необходимо заранее подготовить USB-кабель для подключения. Всю информацию об Arduino и его программной среде можно найти в Интернете. Если у вас есть желание, научиться пользоваться им несложно.
Интерфейс Arduino IDE довольно прост и интуитивно понятен. Если у вас не получается, вы всегда можете обратиться к вики Arduino.
Следующий вариант — использовать программатор. Это специальное устройство, которое продается отдельно. Но он позволяет работать с различными платами Arduino и загружать на них программное обеспечение.
Последнее предложение — использовать одну из плат Arduino в качестве программатора. Этот метод ничуть не хуже других и достаточно эффективен. Чтобы реализовать каждый из предложенных вариантов без необходимости каждый раз снимать пылесос, необходимо обеспечить доступ к разъему платы в корпусе. Это может быть окно, удлинительный кабель под крышкой пылесоса с USB-портом или ваш собственный метод. Лишь бы он был прост в использовании.
Обычно пылесосу не требуется много времени для работы. После зарядки аккумулятора он сразу же «готов к работе». Первые несколько минут покажут, нужны ли дальнейшие улучшения. Например, колеса пылесоса. Или замените шестерни, двигатели и т.д. на более тихий и надежный агрегат.
Тестирование изделия
В базовом режиме работы пылесос должен перемещаться по комнате и обнаруживать препятствия без каких-либо проблем. А если он еще и убирает мусор, значит, идея удалась на 100 %.
Нет пределов совершенству. Модернизация робота-пылесоса может быть выполнена механически (колеса, установка дополнительных вращающихся щеток) или электронно (замена платы Arduino, датчиков, контроллера заряда и т.д.).
Варианты модернизации
Возможно, владелец пылесоса захочет покрасить корпус во время его эксплуатации; для этой цели подходят нитрозольные аэрозоли. Или можно изменить программное обеспечение, адаптировав его к интерфейсу Android, чтобы пылесос стал еще «умнее». И им можно управлять с помощью смартфона. Уже есть готовые идеи и решения. Но вы также можете создавать свои собственные конструкции, для этого и существует платформа Arduino.
В профессиональных устройствах двигатель охлаждается отдельно через специальные технические отверстия. Поэтому они не боятся мешков с мусором.
После подготовки всех необходимых материалов и инструментов вы можете собрать робота-пылесоса. Инструкции следующие:
Сборка
Корпус диаметром 30 см изготавливается из картона или ПВХ. Рекомендуемая толщина стенок — 0,6 см, высота — 9 см. Рекомендуется создавать основание из прочной фанеры.
- На созданное таким образом основание устанавливается бампер из ПВХ. Перед установкой рекомендуется закрепить контакт и ИК-датчик.
- Урна с крышкой изготавливается из фанеры или картона и крепится с помощью магнитов.
- Для обеспечения высокой производительности устройства встроен фильтр. Его можно купить в специализированном магазине или сделать самостоятельно. Самодельный фильтр изготавливается из тканевых салфеток.
- Турбина состоит из компьютерных дисков. Их назначение — создавать всасывающий ток. Материал компьютерных дисков очень прочен и обладает необходимой легкостью и эластичностью.
- Датчик подключен к блоку управления. Его задача — обрабатывать поступающие сигналы.
- Двигатель подключается к выбранному блоку управления через транзистор. Оба элемента отвечают за вращение и замедленное движение.
- Было установлено четыре отборных аккумулятора. Соединение осуществляется по параллельной схеме. Следует отметить, что аккумуляторы создают нагрузку, необходимую для требуемой степени перемещения колеса с напольной стойкой.
- Выбранные щетки или подручные средства из лески кладутся на пол. Соединение может быть выполнено с помощью клея.
- После сборки конструкции необходимо использовать компьютер для загрузки программы. В Интернете существует большое количество программ управления, которые можно скачать бесплатно. Обратите внимание, что для подключения к компьютеру требуется специальный адаптер.
- Убедитесь, что все компоненты надежно закреплены.
- Отдельные компоненты крепятся с помощью клея или саморезов. Бампер должен быть жестким, так как после столкновения с препятствием он должен возвращаться в исходное положение.
Для управления приводными двигателями робота можно использовать микросхему L298. Схема представляет собой Н-мост и может быть собрана самостоятельно из отдельных компонентов, но надежнее купить готовую печатную плату. С его помощью можно управлять скоростью и направлением движения роботизированной метлы.
Клемма ENA или ENB обеспечивает ШИМ-сигнал для регулировки скорости. Противоположные сигналы IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя используются для установки направления вращения. В этом случае, если на клемме IN1 установлена логическая единица, а на клемме IN2 — логический ноль, двигатель будет вращаться в одном направлении; чтобы изменить направление, нужно поменять 1 на 0. Вам нужно собрать его с Arduino в соответствии с этим рисунком (вы можете использовать любые контакты, указанные в скетче).
Робот пылесос своими руками
В полностью автоматическом режиме робот прекрасно справляется с мелким мусором, который так часто доставляет неудобства. Правда, стоимость устройства порой оскорбительно велика, но это не проблема, робот пылесос своими руками прекрасно справляется со своими задачами.
Популярность бытовых роботов-уборщиков растет с каждым днем. Это связано с тем, что эти устройства способны поддерживать чистоту вашего пола, не отнимая у вас много времени. Основное отличие их от управляемых человеком братьев и сестер заключается в том, что они очищают поверхность, передвигаются и ориентируются в помещении. Это достигается благодаря использованию специальных датчиков, которые контролируют изменение режима, движение и зарядку вакуума.
Как сделать робот-пылесос?
Популярность бытовых роботов-уборщиков растет с каждым днем. Это оправдано тем, что эти устройства способны поддерживать чистоту полов, не отнимая у вас много времени. Основное отличие их от управляемых человеком братьев и сестер заключается в том, что они очищают поверхность, перемещаются и ориентируются в помещении. Это достигается благодаря наличию специальных датчиков, которые контролируют изменение режима, движение и зарядку вакуума.
Основная проблема заключается в том, что вывести робот-уборщик на рынок сегодня очень сложно. Правильная модель доступна не везде, а ценовая политика некоторых поставщиков подходит не всем. Но не отчаивайтесь. У вас всегда есть возможность создать робота-пылесоса самостоятельно. Конечно, изготовление своими руками и в домашних условиях — это очень длительный процесс, требующий терпения, определенного количества материалов и инструментов, а также умения работать с подобной техникой. План по созданию робота-пылесоса в домашних условиях понятен даже непрофессионалу. Однако при разработке механизма такого типа необходимо понимать все нюансы предстоящей операции. В противном случае вы только зря потратите время и деньги.
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Диаметр устройства составляет 30 см, а высота — 9 см. Корпус изготовлен из вспененного ПВХ. При этом толщина самого корпуса составляет 6 мм,
- Диаметр блока составляет 30 см, высота — 9 см. Корпус изготовлен из вспененного поливинилхлорида. При этом толщина самого корпуса составляет 6 мм,
- Бампер оснащен 4 датчиками, которые используются для определения положения пылесоса в помещении. Также подключены два коммутатора на случай непредвиденных коллизий. Края имеют резиновые накладки во избежание случайного контакта с мебелью,
- Поддон для сбора пыли и мусора изготовлен из ПВХ толщиной 4 мм. Поддон для сбора пыли и мусора изготовлен из 2 коммерчески доступных тканей, которые можно приобрести в любом хозяйственном магазине. Крышка, которая защищает содержимое контейнера, крепится к основанию с помощью магнитов,
- Турбина сделана из тонких пластиковых листов, фрагментов компьютерных плат и поливинилхлорида,
- Верхняя крышка устройства крепится с помощью клея,
- Инфракрасные датчики имеют 4 выхода для подключения к системе Arduino. Нормальное рабочее состояние означает выход логической единицы, а состояние, в котором активирован хотя бы один из датчиков системы, — логического нуля,
- Если ИК-датчик не активирован, но метла все равно наезжает на препятствие, ее бампер ударяется о выключатель, в результате чего устройство откатывается на несколько сантиметров назад. Затем происходит обратный ход, и работа возобновляется. Выключатели должны быть достаточно прочными, чтобы вовремя вернуть бампер в исходное положение,
- Двигатель, отвечающий за движение передней щетки, подключен к Arduino через MOSFET. Когда робот-пылесос находится в движении, щетка вращается достаточно медленно, чтобы пыль, грязь и мусор не разлетались по комнате, а собирались и всасывались в насадку. Если робот расположен возле стены или угла, он быстрее собирает пыль и грязь, поскольку большинство пыли и грязи скапливается вдоль плинтусов,
- Пылесос работает от 4 литий-ионных аккумуляторов и преобразователя переменного/постоянного тока. Каждая пара указанных литий-ионных батарей соединена последовательно,
- основание устройства изготовлено из высокопрочной фанеры,
- конструкция включает 3 колеса с шарикоподшипниками,
- Все щетки робота-пылесоса сделаны из достаточно жесткой лески.
Особенности изготовления робота-пылесоса дома
Теоретические аспекты
Робот должен иметь форму колеса или диска, чтобы он мог правильно двигаться,
- Колеса расположены по диаметру метлы так, чтобы она могла вращаться,
- Центр тяжести лучше всего находится на колесах, но может быть и рядом с ними,
- Средняя скорость машины составляет 25-35 см/сек,
- Для робота-уборщика требуется контактный буфер не менее 0,5 от окружности,
- Зарядка импровизированного робота должна осуществляться через зарядное устройство, Устройство не требует разборки,
- Пыль и мусор должны собираться в отдельный контейнер, который можно извлечь и очистить.
- Совет. Отметьте на чертеже все компоненты вашего будущего пылесоса и их приблизительные размеры. Используйте стрелки для указания направления движения воздуха и всасываемых частиц пыли. Четкость чертежа — это шаг к успешной сборке.
Как сделать чертёж
Для схематического чертежа нам необходимо определить, какие компоненты необходимы в проекте:
Плата Arduino — «мозг» будущего робота,
- Турбина от старого пылесоса,
- Небольшой мотор (подойдет старый компьютерный холодильник),
- Дальномеры — 2 шт,
- Колеса (предпочтительно 2 обычных и 1 вращающееся), мотор-редукторы,
- Блок управления (для двигателя),
- 3 литиевые батареи,
- контроллер для зарядки,
- проводка,
- Тяжелая картонная коробка.
- Это важно: если вы не можете найти старую турбину, вы можете сделать ее самостоятельно из плотного картона. Принципиальная схема прилагается.
Далее необходимо подключить двигатель к Arduino. Сделайте круг из картона и поместите в него колеса (подумайте о диаметре около 30-35 см для «начинки»). Используйте обычные колеса с обеих сторон, но с угловыми редукторами, и вращающееся колесо между ними для гибкости.
Особенности проведения сборки
Поместите все электронные компоненты и капот на построенное вами основание. Прикрепите дальномер спереди.
Следующий шаг — строительство турбины. Для этого снимите ребра компьютерного кулера и приклейте горячим клеем турбину, сделанную из старого пылесоса. Вставьте его точно посередине: вам не нужен дисбаланс.
Бока метлы можно сделать самостоятельно. Помните: он должен быть цилиндрическим.