- Устройство и принцип работы квадрокоптера
- Общие принципы построения
- Как это летает
- Кто придумал и изобрел
- Зачем и для чего нужен
- Как летает квадрокоптер
- Для настоящих романтиков
- Наблюдение и безопасность
- Квадрокоптер для экстремалов
- Виды мультикоптеров
- Чем обусловлено количество моторов на квадрокоптерах?
- Из каких элементов состоят квадрокоптеры?
- ArduCopter
- Бесколлекторные подвесы (brushless gimbal)
- Коммерческие системы
- Как управляется квадрокоптер
- Управление через радиопульт
- Управление через смартфон
- Управление через G-сенсор
- Примеры управления квадрокоптером
- Для того, чтобы управлять квадрокоптером вам нужно
- Квадракоптеры – новая эпоха в авиастроении
С появлением прочных и легких полимеров, небольших электродвигателей и особенно с удивительными достижениями в области микроэлектроники стало возможным создание надежных и эффективных беспилотных многоцелевых систем.
Устройство и принцип работы квадрокоптера
Сегодня концепция дрона уже знакома широкой молодой аудитории. Эти функциональные устройства используются в различных профессиональных приложениях. Особенно в телевизионном вещании, дроны теперь используются для замены дорогостоящих роботизированных камер. Но как изготовить такое устройство? Для тех, кто не знает, как именно устроен квадрокоптер, как он летает и для каких целей служит, мы хотели бы дать краткое введение в тему.
Что такое квадрокоптер или мультикоптер? Летательный аппарат с более чем одним источником подъемной силы называется квадрокоптером. Они могут быть винтовыми или реактивными. Квадрокоптер имеет четыре двигателя, в то время как мультикоптер может иметь до 12 двигателей.
Квадрокоптер механически устойчив и может быть изготовлен из легких материалов. А общее снижение веса вертолета означает, что его аппаратная платформа может стать более экономичной и автономной, что повышает функциональность вертолета. Сегодня он является самым простым с точки зрения программирования силовых установок и технологии производства.

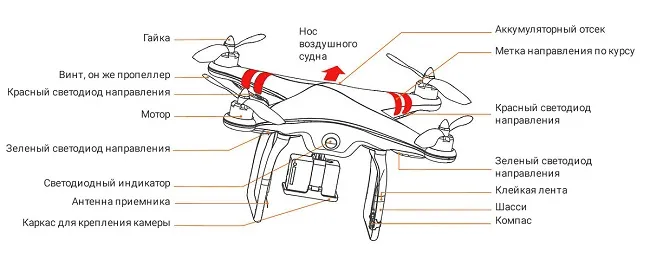
Общие принципы построения
Квадрокоптер с камерой или самая простая модель построена на силовой раме. Он является основным компонентом дизайна. По углам расположены ножки, к которым крепятся двигатели. Для удобства пользователя в некоторых квадрокоптерах используются вращающиеся блоки. Эти колена в основании ног обеспечивают электрический контакт и в то же время обеспечивают удобство для владельца механизма: дрон можно компактно сложить для легкой транспортировки.
Для облегчения посадки ступеньки крепятся к раме снизу. Их конструкция может сильно различаться. Дорогой квадрокоптер выглядит как вертолет, с прочными металлическими полозьями. Дешевые модели часто просто имеют тонкие резиновые удлинители, приклеенные непосредственно к раме.
Совет: Если вам нужен квадрокоптер для выполнения специальных задач с точным позиционированием и посадкой на неровные поверхности, рекомендуем выбрать изделие с тонкими ножками.
Силовая рама также выполняет декоративную функцию. Это самая заметная часть конструкции. Форма рамы определяет общий внешний вид квадрокоптера. Каждый производитель старается сделать свое устройство не только функциональным, но и элегантным и красивым, и это хорошо продается при первом взгляде на фотографию. Именно поэтому оправы изготавливаются различных форм, иногда с размерами, которые ничего не говорят о размере внутреннего наполнения.
Как это летает
Принцип работы квадрокоптера довольно прост: четыре двигателя в ногах с аутригерами создают подъемную силу. Существует несколько типичных режимов работы:
- Лифт с одновременным запуском двигателей,
- Боковой наклон путем изменения скорости вращения левой и правой пары двигателей,
- Спуск с подъемной силой, меньшей, чем вес конструкции,
- ускорение по прямой за счет изменения режима работы передней и задней пар двигателей.
Из приведенных выше данных уже видно, что квадрокоптер работает в соответствии с формой вертолета. Однако вместо наклона оси лопасти, как в случае с крылатым аппаратом, разница показателей воздушного потока по бокам дрона используется для формирования вектора боковой силы.
Сложнее понять, как квадрокоптер вращается на месте. Его основной нож, вращающийся в одном направлении, передает крутящий момент в противоположном направлении на питатель. Чтобы компенсировать паразитное вращение, большой вертолет имеет лопасть в хвосте.
Коптер использует тот же принцип создания обратного крутящего момента для собственного вращения. Его четыре пропеллера работают попарно. Двойные лопасти вращаются в противоположных направлениях. При одинаковых скоростях вращения возникающие крутящие моменты компенсируются. Когда необходимо повернуть дрон вокруг своей оси, скорость двигателя одной из пар снижается. Возникающий при этом крутящий момент вращает всю конструкцию.
Стоимость самых простых дронов невысока — около 20 долларов США. Небольшой дрон с камерой стоит 100-150 долларов США. Исключением из правил является DJI Spark, который предлагается на сайте производителя за 399 долларов США.
Кто придумал и изобрел
Первые квадрокоптеры были разработаны в 1900 году. Американец Георгий Александрович Ботезат сконструировал аппарат с четырьмя пропеллерами, приводимыми в движение одним двигателем. Во время испытаний квадрокоптер пролетел 1 км и поднялся на высоту до 15 метров. Однако, к сожалению, разработка была отложена из-за различных проблем.
Первый современный квадрокоптер был разработан в 2006 году. Этот аппарат был представлен немецкой компанией MikroKopter. Беспилотный самолет был оснащен микроконтроллером, который оценивал данные с гироскопа, акселерометра и барометра. Через некоторое время было добавлено устройство GPS. Дрон был ориентирован на профессионалов и стоил дорого, но программное обеспечение с открытым исходным кодом привело к появлению на рынке дешевых клонов. Это повлияло на доходы компании. Код был закрыт, но было уже слишком поздно. Эта модель побудила других производителей электроники разработать гражданские беспилотники различных размеров и классов.
С появлением прочных и легких полимеров, небольших электродвигателей и особенно с удивительными достижениями в области микроэлектроники стало возможным создание надежных и эффективных беспилотных многоцелевых систем.
Зачем и для чего нужен
Предполагаемое использование современных беспилотных летательных аппаратов очень широко и разнообразно. Он используется в самых разных областях, как для отдыха, так и для работы:
- Воздушные виды спорта и развлечения,
- профессиональная видеосъемка,
- видеонаблюдение и охрана имущества,
- спасательные операции,
- археология и картография,
- сельское хозяйство,
- охота и рыбалка,
- доставка небольших грузов.
В последние годы лучшие квадрокоптеры ориентированы на решение многих нестандартных производственных задач. Чаще всего они используются там, где присутствие человека нежелательно или опасно — в шахтах и карьерах, при обследовании трубопроводов и высотных зданий, вулканических кратеров, изучении погодных явлений и т.д. Этим моделям мы посвятили отдельный раздел. Для таких целей необходим квадрокоптер с камерой.
Как летает квадрокоптер
Принципы работы
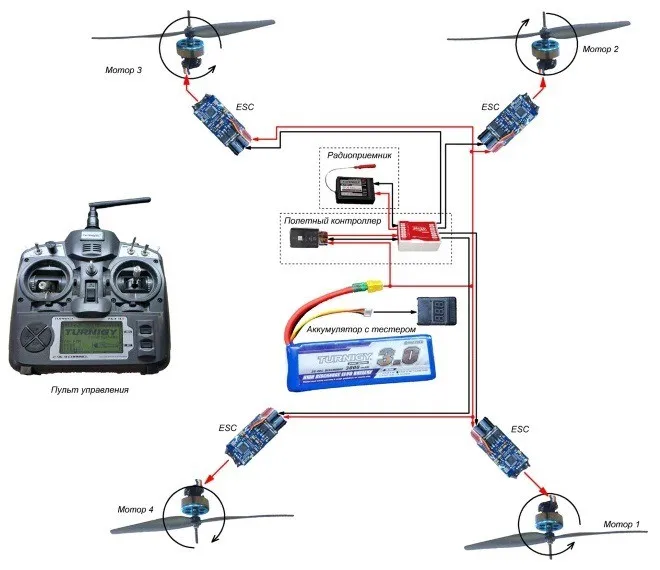
Беспилотный самолет оснащен 4 электродвигателями и таким же количеством пропеллеров. Два диагональных пропеллера вращаются по часовой стрелке (CW), два других (CCW) — против часовой стрелки. Интенсивность вращения и подъема определяет скорость и направление движения нашего дрона.
Если два правых двигателя вращаются быстрее, чем левые, они будут наклоняться и вести автомобиль влево. В противном случае произойдет обратное. Если задние пропеллеры будут быстрее передних, дрон клюнет и полетит вперед. В противном случае головка автомобиля поднимется. Маневры относительно вертикальной оси выполняются с одновременным ускорением винтов CW и соответствующим замедлением винтов CCW. Поворот в противоположном направлении требует ускорения группы CCW и замедления группы CW. Постоянное вращение заставляет дрон взлетать или опускаться.
Наиболее важным электронным компонентом является полетный контроллер. Он отвечает на все команды, полученные через приемник, и отдает команды блокам управления, которые определяют тягу и скорость двигателей. Стабильность обеспечивается гироскопом, который измеряет углы продольного и поперечного наклона, а также скорость крена.
Стоимость самых простых дронов невысока — около 20 долларов США. Небольшой дрон с камерой стоит 100-150 долларов США. Исключением из правил является DJI Spark, который предлагается на сайте производителя за 399 долларов США.
Для настоящих романтиков

Кстати, квадрокоптер поможет вам сделать красивое и эффектное предложение. Например, пара гуляет в парке и поднимается на смотровую площадку с видом на город. В этот момент молодой человек незаметно нажимает кнопку управления дроном на своем смартфоне… и через несколько секунд летательный аппарат приносит девушке обручальное кольцо.
Наблюдение и безопасность
Известно, что продвинутые родители удаленно следят за своими детьми с помощью квадрокоптеров. Так, некоторое время назад один отец в США решил научить свою дочь ходить в школу самостоятельно. Девочка прошла весь путь от дома до школы одна, а отец следил за ней с помощью дрона и при необходимости звонил по телефону, когда ребенок сбивался с пути.
Квадрокоптер также можно использовать для наблюдения за домашними животными во время прогулки. Владельцу четвероногого питомца достаточно настроить фокус дрона на животное, и его любимый Барсик или Рекс будет постоянно находиться в поле зрения камеры.
Квадрокоптер для экстремалов

Его можно использовать в качестве надежного компаса и навигатора, что делает его одинаково полезным для похода за рюкзаком, охоты или рыбалки. Устройство занимает очень мало места в вашем рюкзаке, оно может работать в автономном режиме около получаса и в течение этого времени ориентируется на местности. Если вы заблудились в лесу, просто поднимите квадрокоптер над верхушками деревьев. Беспилотник укажет близлежащую деревню, шоссе или кемпинг и поможет сориентироваться в труднопроходимой местности, например, в овраге или канаве.
Принцип работы квадрокоптера довольно прост: четыре двигателя в ногах с аутригерами создают подъемную силу. Существует несколько типичных режимов работы:
Виды мультикоптеров
Существуют различные типы квадрокоптеров, отличающиеся количеством пропеллеров/моторов (пропеллеры и моторы обычно называют винтомоторной группой или ВМГ).
Помимо квадрокоптеров, существуют:
-
Трикоптер — 3 пропеллера,



Чем обусловлено количество моторов на квадрокоптерах?
Во-первых, при отказе пропеллера или двигателя квадрокоптер упадет на землю и разрушится; гексакоптер приземлится с минимальными повреждениями; октокоптер не заметит потери двигателя/пропеллера.
В следующем видеоролике показана посадка гексакоптера с 5 двигателями без серьезных повреждений.
Во-вторых, гексакоптер может нести большую полезную нагрузку благодаря большей суммарной мощности двигателей.
Но у Hex/Octa есть и свои недостатки:
- Более высокая стоимость — рамы стоят дороже, больше двигателей, регуляторов скорости (ESC) и пропеллеров.
- Для обеспечения сопоставимого времени полета необходимы батареи большей емкости.
В современных БПЛА используются два типа электродвигателей: двигатели без коммутаторов и двигатели с коммутаторами. Последние в основном используются в бюджетных (самых дешевых и доступных) версиях моделей, в то время как профессиональные дроны оснащаются более дорогими и надежными бесконверторными двигателями.

Типы современных двигателей для квадрокоптеров
Из каких элементов состоят квадрокоптеры?
Радиоуправляемый вертолет состоит из двигателей, регуляторов скорости, лопастей ротора, рамы, контроллера полета, аккумулятора, радиоприемника и передатчика. В действительности существует гораздо больше модулей, о которых мы поговорим ниже.
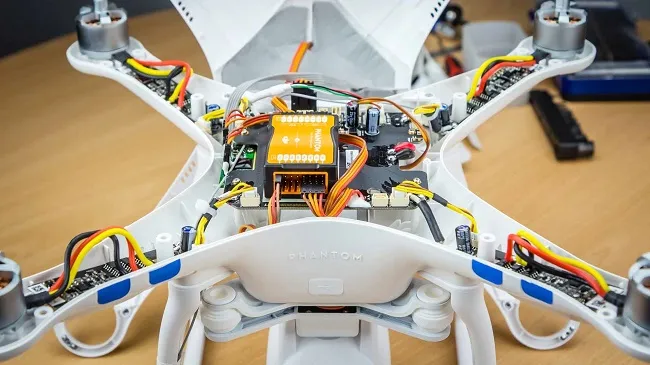
Полетный контроллер является мозгом вашего транспортного средства и отвечает за поведение в полете. Полетный контроллер обычно представляет собой печатную плату или небольшую коробку с микросхемой внутри.
Современные контроллеры полета — это сложные устройства, которые могут обрабатывать сигналы от множества различных устройств и принимать независимые решения о выборе оптимальной траектории полета и избегании столкновений с препятствиями. Такие контроллеры установлены в DJI Mavic Pro и DJI Spark.
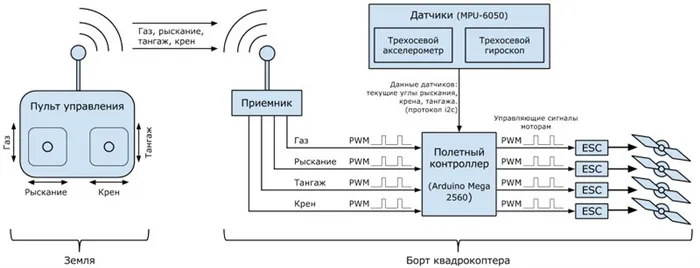
Полетный контроллер обычно состоит из четырех основных датчиков:
- Акселерометр или датчик угловой скорости,
- Акселерометр или акселерометр акселерометр или акселерометр акселерометр или акселерометр акселерометр или датчик угла ускорения, или гироскоп,
- магнитометр или компас,
- Барометр — это датчик давления воздуха, который помогает контролировать высоту над уровнем моря.
Он управляется с помощью радиопередатчика, также известного как пульт дистанционного управления. Большинство передатчиков работают на частоте 2,4 ГГц, являющейся своего рода стандартом. Команды передатчика поступают на радиоприемник, который подключен к полетному контроллеру. Полетный контроллер обрабатывает сигнал, полученный от радиоприемника, и посылает команды двигателям. Поэтому можно сказать, что полетный контроллер управляет вращением двигателей, но не напрямую, а через контроллер скорости или ESC (Electric Speed Controller).
Панель управления квадрокоптера DJI Mavic Air Fly More Combo
В самом общем случае управление вертолетом осуществляется по 4 каналам, а именно Pitch, Roll, Yaw и Throttle, как упоминалось ранее. Чтобы понять, как управлять дроном, прочитайте раздел «Основные элементы управления квадрокоптером».
Вы также можете увидеть простейшую схему современного квадрокоптера:
Интересный тип управления также требует использования мобильного устройства. Однако в этом случае оператору не нужно нажимать кнопки, предлагаемые специальным приложением. Дрон меняет направление полета, наклоняя смартфон. Этот метод очень хорошо подходит для высокоскоростных маневров.
ArduCopter
Другая система на базе Arduino пошла еще дальше. Сейчас это система с возможностью программируемого полета «точка-точка», поддержкой радиомодема и передачей телеметрии, хранением различных протоколов и т.д. Их программное обеспечение выглядит примерно так:
Доски эволюционировали от этих до этих.
Доски уже доступны в магазинах, цены варьируются от $50 (за клоны) до $250 за оригинальные версии. Исходный код Ardupilot также полностью доступен на github, и, судя по количеству релизов, проект активно развивается. Эта система ни в чем не уступает профессиональным аппаратам, а качество полета можно увидеть на видео:
Здесь все хорошо, кроме одного «но» — это открытый исходный код, со всеми вытекающими отсюда последствиями. Система имеет открытый исходный код, разработанный пользователями-энтузиастами, и никто ничего не гарантирует, даже отсутствие ошибок в программном обеспечении. Если квадрокоптер врезается в BMW, жаловаться некому.
Бесколлекторные подвесы (brushless gimbal)
Помимо квадрокоптеров, была разработана еще одна очень интересная технология, а именно крепление для камеры/камеры без мотора. Это отдельная печатная плата с собственными датчиками, которая удерживает камеру в нужном положении с помощью двух двигателей и компенсирует вращение соответствующих осей. Разработанный нашим соотечественником, вы можете увидеть на видео (2013), как работает подвеска.
Вы можете видеть, что вертолет шатается, но ось камеры не двигается.
Сегодня это никого не удивляет, но тогда это была настоящая революция в качестве видео.
Коммерческие системы
Писать об этом не так интересно, потому что принцип здесь простой: «плати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в экономической сфере были популярны машины марки Gaui (они были первым экономическим субъектом с ценой около 400 долларов за готовый вертолет). Наконец, самой успешной компанией стала DJI, но это не для ленивых, поэтому повторяться здесь не нужно. Они вышли на рынок с контроллером DJI Naza (цена $200-400, с возможностью удерживать позицию, возвращаться домой), была отдельная профессиональная серия DJI Wookong (цена более $1000 и большая стабильность полета). Наконец-то компания DJI вышла на рынок готовых к полету летательных аппаратов (RTF), о которых знают все.
И последнее видео. Первый недорогой квадрокоптер Gaui 330. Цена $400, 2010 год, без дополнительных функций.
Dji Naza v2, та же цена $400, возможность удерживать позицию, возвращаться домой, летать в обе стороны от пилота (случайный режим).
Dji Phantom 3 — со встроенным креплением для камеры, управлением со смартфона и другими замечательными функциями.
Приносим извинения за большое количество видео, но без них не обойтись, иначе было бы неинтересно. Посмотрим, что будет через пять лет….
Самые современные самолеты нашего времени способны летать на высоте до 5000 метров. Полеты в верхних слоях атмосферы связаны с разбавлением и более низкой температурой воздуха. Лучшие модели компенсируют эти проблемы большими пропеллерами и автономной системой отопления.
Как управляется квадрокоптер
Квадрокоптером можно управлять различными способами. Недорогие модели поддерживают только один режим пилотирования, в то время как более дорогие модели могут иметь несколько режимов на выбор.
Управление через радиопульт
Этот метод является самым важным: параметры полета задаются с помощью специального контроллера, напоминающего компьютер. С помощью джойстика он может регулировать обороты двигателя, увеличивать или уменьшать высоту, застывать на месте или вращать вертолет.

Главное преимущество пульта дистанционного управления — поддержка максимальной дальности сигнала.
Управление через смартфон
Многими дронами можно управлять с мобильного телефона — в этом случае на смартфон необходимо установить специальное приложение. На экране устройства появляется панель управления с теми же кнопками, что и на джойстике. Связь с вертолетом осуществляется через Wi-Fi, и устройство может передавать фотографии и видео в режиме реального времени на смартфон.

Недостатком управления дроном через смартфон является небольшой радиус действия — около 100 м или чуть больше.
Управление через G-сенсор
Интересный тип управления также требует использования мобильного устройства. Однако в этом случае оператору не нужно нажимать кнопки, предлагаемые специальным приложением. Дрон меняет направление полета, наклоняя смартфон. Этот метод очень хорошо подходит для высокоскоростных маневров.

При управлении с помощью наклона смартфона дрон повторяет пространственную ориентацию мобильного телефона.
При выборе конкретной модели следует руководствоваться задачами, которые вы хотите решать с помощью дрона. Например, видео с дрона может передаваться в режиме реального времени или записываться на флэш-память. Первый вариант, конечно, предлагает гораздо больше возможностей для видеозаписи и мониторинга.
Примеры управления квадрокоптером
В ручном режиме пилот полностью управляется пользователем, без стабилизации оси — лучший режим для профессионалов, выполняющих трюки без помощи системы fly-by-wire.
Режим Stabilised/Height идеально подходит для новичков, поскольку контроллер отслеживает горизонтальное и вертикальное движение дрона, ограничивает угол наклона и стабилизирует дрон в пространстве.
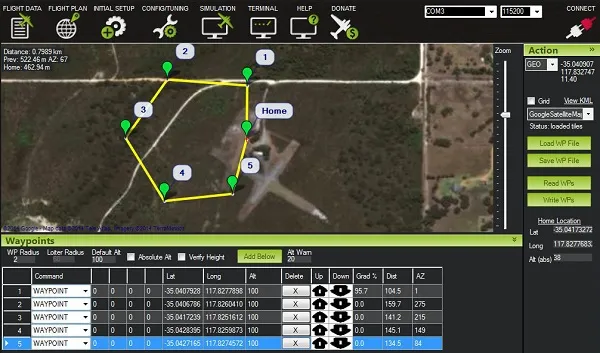
GPS-стабилизация — это режим, при котором полет проходит по строго заданной траектории; квадрокоптер зависает в заданных координатах и сохраняет свое положение столько, сколько необходимо, — хорошее подспорье для качественных и интересных снимков с воздуха.
Последние модели оснащены интеллектуальными режимами полета, которые облегчают видеосъемку в воздухе. Все они разработаны для удобства оператора, например, в режиме waypoint мультикоптер следует по заданному сложному маршруту, а пользователь просто выбирает лучшие ракурсы для видео.
 |
Для того, чтобы управлять квадрокоптером вам нужно
Вот несколько советов для тех, кто планирует свой первый полет:
- Приобретите недорогой вертолет с небольшими размерами и достаточной функциональностью, чтобы научиться основам пилотирования.
- Внимательно изучите инструкции, прилагаемые к дрону. В интернете есть много видеороликов, которые шаг за шагом объясняют принципы управления дроном. Не стесняйтесь обратиться за помощью к более опытному пользователю. Любителям полетов, решившим профессионально заниматься аэрофотосъемкой, рекомендуется пройти специальные курсы обучения, которые часто предлагают магазины, где продаются дроны.
- Перед первым запуском дрона ознакомьтесь с панелью управления, запомните расположение переключателей и их функции, проверьте, как нажимаются кнопки — слегка или с силой, все это значительно снизит риск повреждения вашего летательного аппарата.
- Подготовьте устройство к полету. Убедитесь, что все компоненты надежно закреплены, чтобы ничего не отвалилось во время полета, проверьте комплектность аппарата, возьмите запасные пропеллеры, зарядите аккумулятор, возьмите запасные батареи, так как они никогда не бывают бесполезными.
- Заранее выберите открытое место, желательно без посторонних людей и особенно без маленьких детей.
- Безветренный день идеально подходит для первого запуска квадрокоптера, установите оптимальный для вас режим полета и начните свой первый успех в мире увлеченных летунов.
Квадракоптеры – новая эпоха в авиастроении
Сегодня летающие дроны — это уже не просто увлекательное хобби, а активно развивающаяся область авиации.
Дроны необходимы для журналистики, поскольку репортажи из горячих точек всегда сопряжены с опасностью, а квадрокоптеры снимают высококачественные видеоматериалы на расстоянии.
Данные с беспилотников также важны для поисково-спасательных операций, где дроны могут предоставлять информацию из труднодоступных районов.
Охрана границ, борьба с преступностью и сбор данных для статистических и научных исследований — вот лишь некоторые из задач, которые могут выполнять радиоуправляемые летательные аппараты. Квадрокоптер — это технология будущего, открывающая целую вселенную новых возможностей для человека, и теперь она доступна каждому из нас.







