- Как собрать квадрокоптер своими руками: инструкция по сборке самодельных квадроптеров и дронов
- Базовые узлы и компоненты
- Процесс сборки
- 1: Строим раму
- 2: Монтируем силовой агрегат и пропеллеры
- 3: Устанавливаем «мозги»
- Готовые комплекты
- Сборка в домашних условиях
- Двигатели
- Выбор лопастей
- Алгоритм сборки
- Самодельный квадрокоптер
- Какие есть варианты?
- Ready to fly (готовый к полету)
- Almost Ready to Fly (почти готовый к полету)
- Полная сборка с нуля
- Самодельный дрон из подручных материалов
- Как собрать квадрокоптер своими руками: инструкция для начинающих
- Подбор материалов и комплектующих
- Детали с Али экспресса
- MultiWii 328P
- Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
- NTM Prop Drive Series 28-30S
- Похожие статьи:
- Пошаговая инструкция по сборке
- Этап первый. Сборка
- Этап второй. Отладка
- Заключение
- Необходимые детали
- Рама и ее комплектующие
- Сборка
- Настройка
- Как сделать квадрокоптер с камерой своими руками
- Сборка рамы
- Установка моторов
- Сборка электроники
- Установка камеры
- Установка регуляторов оборотов и подключение проводов
- Как сделать гоночный квадрокоптер своими руками
- Сборка моторной части
- Установка электронной части
- Подсоединение проводов
- Как сделать квадрокоптер для человека своими руками
- Установка моторов и регуляторов оборотов
- ёСборка системы управления
Теперь давайте посмотрим, как построить квадрокоптер вашей мечты. В самом начале я хотел бы отметить, что это общее руководство, и некоторые моменты могут отличаться. Я постараюсь систематизировать процесс и выделить наиболее важные моменты при выборе и сборке.
Как собрать квадрокоптер своими руками: инструкция по сборке самодельных квадроптеров и дронов
Первые испытания мультикоптеров были проведены в 1922 году, но только во втором десятилетии XXI века этот тип летательных аппаратов начал набирать популярность впечатляющими темпами. По сравнению с другими дронами, квадрокоптеры пользуются большим спросом, вероятно, потому, что у них есть практическая цель: по крайней мере, делать красивые фотографии с воздуха.
Чтобы удовлетворить потребительский спрос, производители наводняют рынок множеством моделей в различных конфигурациях и с разными характеристиками. Многие клиенты предпочитают комплекты RTF (Ready-to-Fly), которые можно запускать с земли после простой калибровки.
Но не все хотят простого решения. Особенно интересно собрать квадрокоптер самостоятельно с нуля. Уровень сложности варьируется от наборов со всеми необходимыми для сборки деталями до выбора отдельных деталей, проверки их совместимости, сборки и настройки собственного квадрокоптера.
Также полезно собирать квадрокоптер для конкретных задач, для которых заводские модели не подходят. Вы также можете построить свой собственный аппарат для обучения полетам, который вы не побоитесь сломать. Вам не нужен подробный чертеж, достаточно эскиза со всеми нарисованными элементами.

Базовые узлы и компоненты
Чтобы построить устройство, которое можно поднять в воздух, хотя бы теоретически, и собрать квадрокоптер своими руками, необходимо приобрести набор подходящих компонентов:
- Полетный контроллер — «голова» будущего дрона, в которой находятся все основные датчики и программное обеспечение для обработки их показаний, а также команды пульта управления и контроль скорости вращения отдельных двигателей. Это самый дорогой компонент, который необходимо приобрести для сборки квадрокоптера.
- Продвинутые моделисты сами собирают раму из тщательно подобранных материалов (алюминий, пластик, дерево, углеродное волокно или их комбинации). Если у вас нет опыта или знаний в области машиностроения, если сборная рама лучше всего подходит для вашей конструкции, или если у вас нет желания или времени самостоятельно разрабатывать квадрокоптер и его компоненты, сборные рамы, доступные в различных размерах, могут оказаться полезными.
- Лучше всего выбирать бесщеточные двигатели, так как они немного дороже, но гораздо надежнее коллекторных. Полет требует высокой скорости, поэтому отсутствие коллектора положительно сказывается на долговечности. Купите как минимум 4 (или 8, если вам нужен октокоптер), с 1-2 запасными, если позволяет бюджет.
- Контроллеры двигателей — это печатные платы, которые управляют скоростью отдельных двигателей и подают на них питание; они установлены на «стойках» корпуса. Их количество соответствует количеству двигателей.
- Пропеллеры или движители следует выбирать с особой тщательностью, так как их размер должен соответствовать размерам будущего шасси, будь оно самодельным или покупным.
- Плата распределения питания используется для распределения питания от аккумулятора к регуляторам оборотов двигателя. Обычно каждый купленный корпус поставляется с небольшой печатной платой, на которую можно припаять входы всех контроллеров, а затем подать на них питание. При желании вы можете заказать расширенную версию материнской платы, если ваш квадрокоптер имеет особую компоновку.
- Покупка аккумуляторов — одна из самых сложных задач. Выбор типа батареи полностью зависит от предполагаемого использования модели, которую вы собираете. Для быстрых моделей лучше покупать небольшие аккумуляторы с высоким KV (обороты в минуту × вольт), а для медленно движущихся машин для съемки на первый план выходит соотношение емкости и веса, так как вы в любом случае перегрузите конструкцию. Полезным дополнением является контроль заряда батареи. Также необходимо специальное выравнивающее зарядное устройство для выбранного типа батареи (литий-ионной или литий-полимерной).
- Пульт дистанционного управления с модулем приемника, подключенный к полетному контроллеру для управления устройством. Тип пульта дистанционного управления определяет удобство использования и некоторые другие доступные функции.
- Дополнительные опции выбираются в зависимости от предполагаемого использования будущего автомобиля. Например, дроны часто оснащаются стабилизаторами камеры для съемки, а гоночные дроны бесполезны без FPV (вид от первого лица).
Для сборки требуется всего несколько инструментов — отвертка для сборки каркаса, паяльник и, конечно, умение обращаться с устройством.
Отсутствие последнего легко устранить во время сборки, если у вас есть паяльник. И предпочтительнее использовать паяльники с тонкими концами.
Процесс сборки
Существует множество вариаций расположения и конструкции поликуттера, но наиболее распространенной является модель с четырьмя болтами. Поэтому сборка такой четырехболтовой машины служит примером пошагового обзора процесса сборки. Вы можете полагаться на приблизительные чертежи квадрокоптеров из сети или построить их самостоятельно.
1: Строим раму
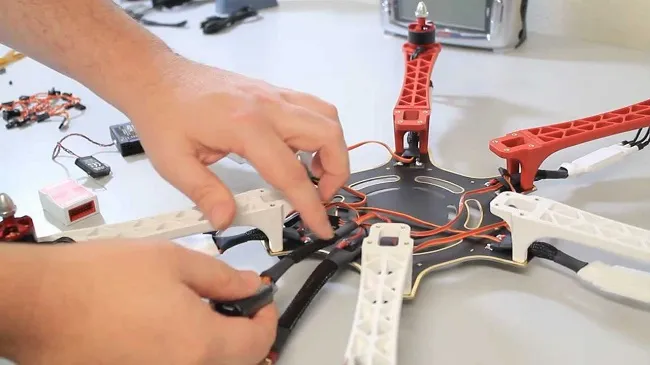
Независимо от размера или предполагаемого использования, каждый дрон должен иметь раму, каркас, крепление. Сборка сборных рам не должна быть сложной, так как они поставляются с подробными инструкциями и всеми необходимыми крепежными элементами.

Чтобы собрать раму самостоятельно, вам потребуется отработать навыки конструирования. Самодельная рама квадрокоптера из металла, пластика, армированного металлом пластика или дерева должна быть достаточно прочной. Например, толщина деревянных деталей каркаса, который вы построили своими руками, должна быть не менее 30 мм. Если вы установите свой квадрокоптер на недостаточно прочную раму, это будет пустой тратой времени и усилий, потому что он часто будет ломаться.
В любом случае, на выходе должно получиться определенное количество балок одинаковой длины, которые поддерживают двигатели и крепятся к центральной опорной плите. Здесь же крепятся опоры для посадки или «ножки». В некоторых вариантах ноги «посажены» под двигатели. Все зависит от характеристик, продиктованных конструкцией квадрокоптера и его шасси.
2: Монтируем силовой агрегат и пропеллеры
Двигатели, органы управления ими и пропеллеры играют решающую роль в скорости, маневренности и других характеристиках полета. Поэтому следует выбирать продукты от брендов, которые тесно сотрудничают с индустрией квадрокоптеров, а не от тех, кто случайно оказался в этом сегменте рынка.
Двигатели для одного и того же проекта должны быть одной модели и одного производителя.
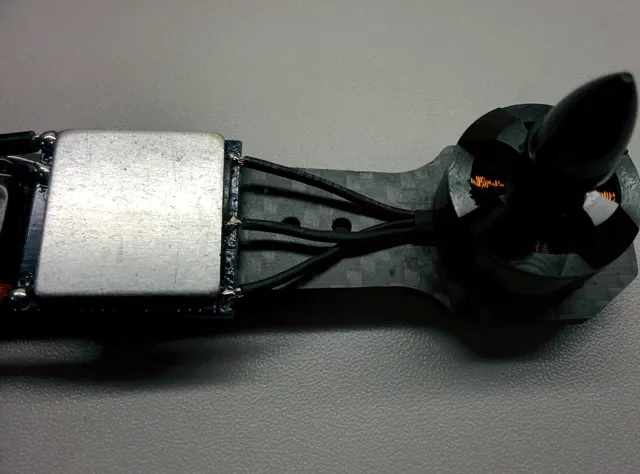
Да, движение возникает из-за разницы в скорости вращения, но оно должно строго контролироваться. Неоднородный движитель нарушит равновесие. Они крепятся к внешним концам «стоек» с помощью винтов.

После двигателей регуляторы скорости размещаются на высоте их креплений и закрепляются кабельными стяжками. Контроллеры подключаются как к двигателям, так и к панели управления с помощью прямой сварки и разъемов. При желании и наличии бюджета можно использовать контроллер 4-в-1, но тогда схема квадрокоптера немного изменится. В результате получился почти полный вертолет, не хватает только контроллера полета.
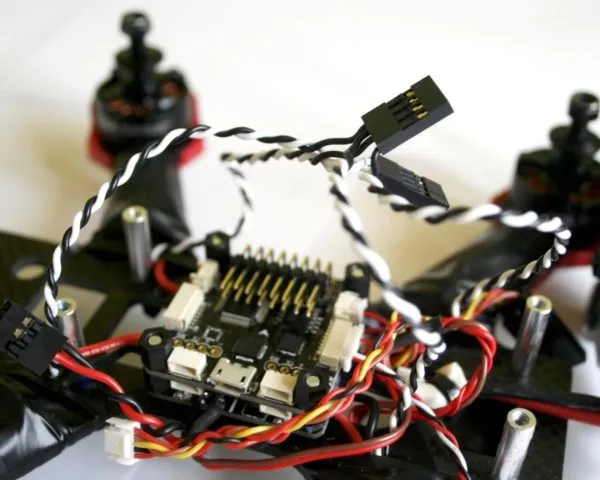
3: Устанавливаем «мозги»
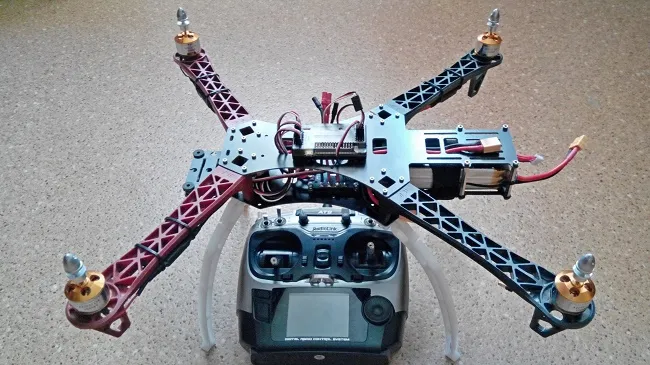
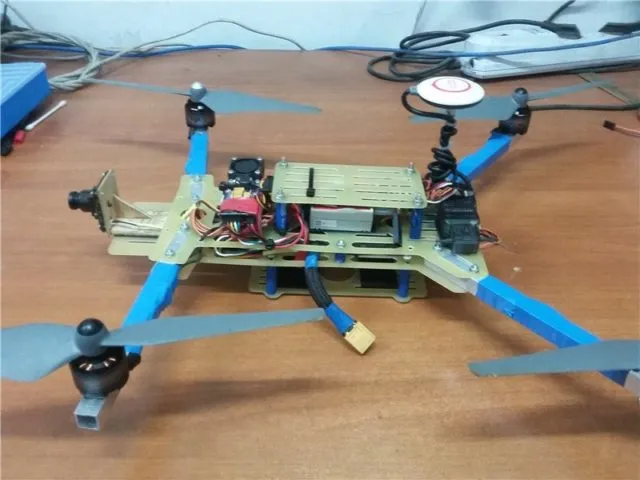
Полетный контроллер обычно устанавливается на верхней части рамы над распределительной панелью и батарейным отсеком. Расположение может быть различным, но помните, что чем ниже центр тяжести, тем устойчивее автомобиль.
Чтобы минимизировать воздействие вибрации на контроллер полета, монтажная поверхность часто прорезиненная или предназначена для поглощения вибрации. На этапе проектирования это хорошая возможность проявить техническую изобретательность, не нанося непоправимого ущерба всей конструкции.
Когда он опущен, его приходится сильно опускать, что может вызвать проблемы с посадкой, взлетом и маневренностью из-за смещенного центра тяжести.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые комплекты. Это так называемые ARF-наборы, которые содержат минимум компонентов для постройки дрона с предсказуемыми характеристиками. В то же время владельцу предоставляется определенная свобода в изменении параметров изделия путем замены лезвий, батарей и других компонентов.

Комплекты ARF обычно включают в себя:
- Части рамы,
- главная печатная плата,
- двигатели,
- лопатки,
- батареи,
- соединительные кабели,
- Соединения.
После сборки самодельного квадрокоптера устанавливается система управления. Его можно приобрести отдельно.
Совет! Рекомендуется приобрести систему управления, состоящую из пульта дистанционного управления и приемника. Они полностью синхронизированы друг с другом и не требуют сложных настроек.
Еще одним преимуществом комплектов ARF являются широкие возможности по изменению летных характеристик дрона. Можно построить квадрокоптер дальнего радиуса действия, подключив его к соответствующей системе управления. Или обеспечить хорошие характеристики маневрирования с помощью специальных пультов дистанционного управления.
Сборка в домашних условиях
Квадрокоптер можно собрать дома самостоятельно. Он не будет работать без покупки сложных электронных компонентов. Однако раму с ножками двигателя можно изготовить из подручных материалов. Существует несколько вариантов сборки. Рама может быть изготовлена из пластиковых водопроводных труб или из тонких алюминиевых профилей квадратного сечения.
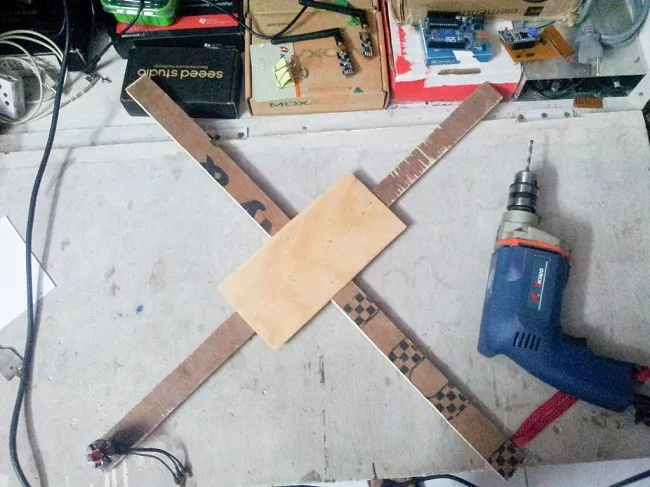


Самый простой способ — сделать каркас из фанеры. Вам понадобится квадрат, размеры которого будут зависеть от размера будущего вертолета. Ножки двигателей крепятся к основанию фанерной рамы. Это может быть готовое промышленное изделие или детали, изготовленные вручную. Сборка приводной рамы осуществляется поэтапно следующим образом.
- Сверху должен быть составлен план строительства. Обратите внимание на угол 90 градусов между ногами и такое же расстояние между двигателями по диагонали.
- Размер центрального профиля из фанеры или профиля определяется путем разметки необходимых точек крепления ножек.
- Если ножки двигателей изготовлены из подручных материалов, например, плоских профилей, необходимо предусмотреть безопасную точку для крепления двигателей.
Только люди, обладающие высоким уровнем знаний в области создания моделей и ручного инструмента, могут выполнять все работы самостоятельно. Требуется максимальная точность и минимальное количество материала.
Совет. Новичкам рекомендуется покупать готовую к сборке раму. Пользователь получит продукт, в котором есть место для батарей и моторов, а вес снижен до минимума.
Двигатели
Для сборки вертолета в домашних условиях рекомендуется приобрести готовый моторный комплект с элементами управления. Это устраняет возможные расхождения в скорости и другие трудности баланса. Однако если вы хотите собрать все самостоятельно, включая систему мотора подъемника, вам следует придерживаться следующих рекомендаций:
- Диаметр пропеллера, который рассчитывается по размерам рамы,
- размеры зоны установки двигателя (площадь и высота кронштейна боковой стенки).

Выбор двигателя осуществляется в соответствии с его маркировкой. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию прилагается тип и размер рекомендуемых лезвий. Затем, исходя из веса дрона и скорости вращения двигателя в режиме зависания (указанной в спецификации), выбирается конкретная марка пропеллера.
Выбор лопастей
Лезвия — одна из тех простых деталей, на которые новички не обращают особого внимания. От конструкции этого компонента зависят летные характеристики дрона в целом. Рекомендации по выбору лезвий следующие.
- При сборке квадрокоптера с камерой важно, чтобы вибрации во время движения были как можно меньше. Это можно сделать с помощью двухлопастного пропеллера.
- Трехлопастные пропеллеры обеспечивают большую тягу, но также требуют большей мощности двигателя для их перемещения.
Алгоритм сборки
Сборка квадрокоптера не представляет особой сложности.
- Каркас собирается из готового набора или подручных материалов.
- Электронная система управления крепится к центральной пластине рамы. Это печатная плата, которая управляет скоростью вращения двигателя и обрабатывает сигналы от пульта дистанционного управления.
- Радиоприемник прикреплен к плате управления. Его можно прикрепить к шасси с помощью горячего клея.
- Для установки двигателей просверлите отверстия в ножках на одинаковом расстоянии от центра рамы до приводного вала.
- Проложите кабели, блок питания для управления двигателями. Если вы приобрели комплект оборудования, в нем будут все необходимые кабели и инструкции. Если вы выполняете работу самостоятельно, помните, что проводка подключается в соответствии с типом контрольной панели, схема параллельная.

Сборка завершается тщательной изоляцией мест соединения термоусадочной трубкой. Если необходимо защитить панели управления от влаги, их закрывают крышками. Затем можно подключить аккумулятор и проверить вертолет в работе.

Лезвия — одна из тех простых деталей, на которые новички не обращают особого внимания. От конструкции этого компонента зависят летные характеристики дрона в целом. Рекомендации по выбору лезвий следующие.
Самодельный квадрокоптер
Конечно, можно купить готовый дрон, но это не так интересно, как собрать его самостоятельно, даже из готовых компонентов, поставляемых производителем в наборах. Более того, любая сборная конструкция не будет отвечать потребностям покупателя.

Самый захватывающий способ получить квадрокоптер — это настроить конфигурацию, выбрать подходящие аксессуары и собрать все в единую конструкцию. Вы можете приобрести необходимые вам товары, например, на e-bay или AliExpress, сделав заказ через Интернет. Легальное использование беспилотников
При постройке самодельного квадрокоптера необходимо соблюдать, помимо прочего, законодательные ограничения для сверхлегких летательных аппаратов. Это относится и к беспилотным летательным аппаратам.
По сути, они распространяются только на документацию квадрокоптеров весом более 250 граммов. Если самолет тяжелее, но весит менее 30 килограммов, необходимо разрешение Федерального управления гражданской авиации. Вы также можете получить его по почте, отправив в Росавиацию фотографию дрона и его характеристики.
Какие есть варианты?

Итак, давайте рассмотрим все способы купить или построить небольшой самолет, который можно использовать как в качестве игрушки, так и для серьезных задач. Квадрокоптер в полете
Ready to fly (готовый к полету)
Под это определение попадают все квадрокоптеры, которые продаются в собранном виде. После покупки достаточно включить их в сеть и воспользоваться беспроводным пультом дистанционного управления. Самый простой способ научиться летать.
Almost Ready to Fly (почти готовый к полету)
Ассортимент продукции этих моделей довольно обширен. Производитель может поставлять все необходимые компоненты комплекта или только определенные компоненты дрона. Например, рама или блок управления двигателем. Сборка и приобретение недостающих деталей полностью возлагается на владельца такого набора.

Покупать такой квадрокоптер рекомендуется новичкам. Он позволяет познакомить человека с основами создания летательного аппарата и при этом довольно прост в сборке. Вариант сборочных комплектов
Полная сборка с нуля
Один из самых интересных вариантов с относительно низкими трудовыми и временными затратами. При выборе компонентов самолета производятся расчеты в соответствии с желаемыми характеристиками и номенклатурой, имеющейся на рынке.
Это означает, например, что для большого квадрокоптера требуются большие и мощные детали. Их характеристики напрямую зависят от планируемого веса дрона. Чем больше рама, тем тяжелее вес дрона, а это значит, что он должен быть оснащен высокоскоростными двигателями, большими пропеллерами и подходящей системой питания для всей силовой электроники и обычной бортовой электроники.
Важной деталью является выбор контроллера, который управляет всем этим. Он регулирует скорость вращения пропеллеров и предотвращает опрокидывание транспортного средства во время полета. В его функции также входит управление движением дрона в ответ на команды оператора на земле. Тип полетного контроллера
Не лишним будет проверить характеристики передатчика и приемника дистанционного управления, установленных в автомобиле. Чем они мощнее, тем больше расстояние, с которого вы можете управлять квадрокоптером.
Наконец, вложения. Без них дрон — не более чем летающая игрушка. Однако, установив камеру с передатчиком на раму квадрокоптера, можно найти и другие практические применения.
Опять же, большое значение имеет радиус действия радиосвязи дрона и потребляемая мощность (и, следовательно, заряд батареи всего устройства). Управляемая камера с регулируемым увеличением и яркостью также является преимуществом при использовании дрона.
Самодельный дрон из подручных материалов

Полностью самостоятельно собранный квадрокоптер
- Несущая рама. Собственно «корпус», к которому крепятся гребные электродвигатели, батареи, системы управления, регулятор и подвесное оборудование. Его можно купить или сделать из дерева, труб ПВХ, пластика или алюминия. Единственные требования — легкость и прочность.
Как собрать квадрокоптер своими руками: инструкция для начинающих

Один из сборных беспилотников
Чтобы облегчить покупку вашего первого квадрокоптера, а также научить вас основам, стоит покупать комплекты дронов, которые уже содержат все необходимые компоненты устройства. Их сила, мощность и возможности уже подобраны в соответствии с конструкцией и весом конечного дрона.
Подбор материалов и комплектующих
Готовые комплекты, компоненты которых подбираются производителем, рассчитаны на конкретные характеристики автомобиля. К ним относятся максимальное расстояние и положение до оператора, максимальная высота и скорость. Полезная нагрузка — грузоподъемность беспилотного летательного аппарата — является обязательным параметром.
Сосредоточьтесь на этом и сделайте выбор оборудования.
Детали с Али экспресса
Один из бюджетных вариантов, представленных на Aliexpress для самостоятельной сборки, без функциональности квадрокоптера — Flysky i6 F450. Его цена составляет 12086 рублей.

В комплект входят все компоненты, позволяющие построить собственный дрон, кроме аккумулятора и аксессуаров — камеры, но ее размещение продиктовано конструкцией каркаса устройства. Что входит в комплект?
Чтобы удовлетворить потребительский спрос, производители наводняют рынок множеством моделей в различных конфигурациях и с разными характеристиками. Многие клиенты предпочитают комплекты RTF (Ready-to-Fly), которые можно запускать с земли после простой калибровки.
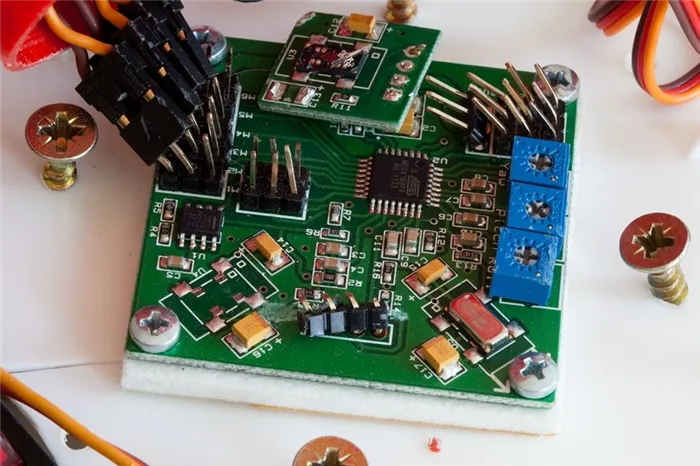
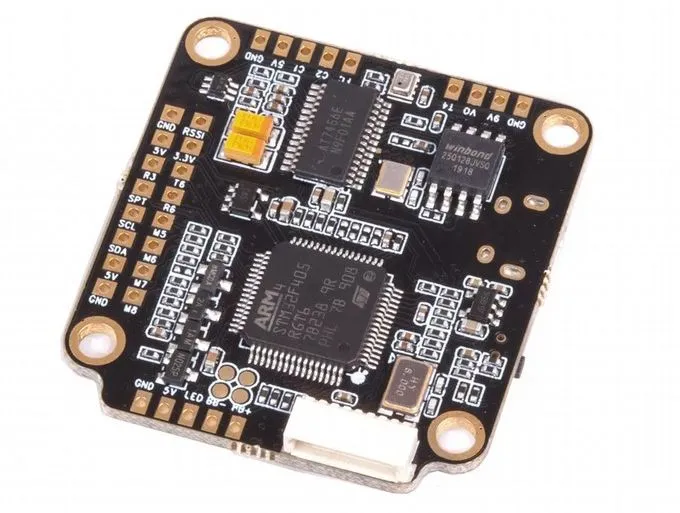
MultiWii 328P
ITG3205 Трехосевой гироскоп BMA180 Акселерометр BMP085 Барометр HMC5883L Магнитометр
Цена : 1050 руб.
MultiWii 328P — это панель управления с наилучшим соотношением цены и качества. Программатор встроен в панель, акселерометр позволяет компенсировать дрейф гироскопа, бародатчик — автономно зависать на определенной высоте, а магнитометр (фактически компас) включает функцию управления, когда коптер может лететь по прямой, вращаясь вокруг своей оси.
Такая комбинация датчиков позволяет не только полностью автономно управлять квадрокоптером, но и контролировать гироскопическое крепление камеры, которая при любом развитии самодельного квадрокоптера держится параллельно горизонту.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, помимо панели управления, важную роль играют и регуляторы скорости. Рекомендуется приобрести специальные контроллеры для квадрокоптеров — Turnigy MultiStar, их не нужно перепрограммировать.
Для самостоятельно построенного квадрокоптера с размерами 450-600 мм подойдут следующие блоки управления:

NTM Prop Drive Series 28-30S
Цена: 580 руб.
Купить мотор для квадрокоптера можно здесь.
580A.

Цена: 990 руб.
Купить мотор для квадрокоптера можно здесь.
580A.
Похожие статьи:
Плата MultiWii 328P, можно заменить, я так понимаю эта самая мощная здесь Multiwii и Megapirate AIO Flight Controller w/FTDI (ATmega 2560) или здесь этот полетный контроллер MultiWii MicroWii to MC ATmega32U4 USB / BARO / ACC / MAG. Если нет, то какие из них подходят для создания «летающей камеры». Я новичок в этой области, так что не пинайте меня слишком сильно. И я понимаю, что рамка, приведенная здесь, не подходит для установки камеры?
На самом деле, вы можете использовать любой летающий контроллер. Наза, безусловно, лучшая. Для автоматического возврата квадрокоптера при потере связи вам понадобится карта с поддержкой GPS и само устройство.
Если вы не хотите летать дальше 100 метров и используете только режим «ручного управления», подойдет любая из этих моделей. Если вы хотите использовать функцию автоматического зависания, используйте Naza Lite с GPS или Naza V2 с GPS.
Multiwii и Megapirate — хорошие контроллеры для подключения GPS, но настройки должны быть адаптированы к квадрокоптеру. Это не слишком сложно, но займет несколько дней.
Nasa, с другой стороны, действительно «нестандартна», поэтому они любят ее, несмотря на более высокую цену.
Такой автомобиль можно построить с двигателем внутреннего сгорания. Это не шпионаж (шум выхлопных газов). Например, для съемки линий электропередач. Конечно, если вы летите над изображением камеры и, вероятно, над линией прямой видимости (силовые кабели — не игрушки), вам нужно учитывать возможность того, что силовые кабели будут повреждены роторами и фюзеляжем (разве вы не можете использовать углепластик без покрытия и стеклоткань? Вы знаете почему ).
Нет. Только если двигатель внутреннего сгорания приводит в действие генератор, а двигатели гребного винта — электрические. Были некоторые попытки построить четырехколесные машины с двигателями, но они оказались бесполезными, потому что двигатели медленные и имеют сильные вибрации. Дальнейшее обсуждение этой темы возможно только на форуме.
Может быть, он будет повернут. Кстати, мне не нравится слабость электродвигателей таких устройств (хотя компенсация порывов ветра на электро облегчает задачу) и конечно же автономность с аккумуляторами (ну не просят же продать/подарить тот же аккумулятор СЖ Д-5). Зарядка занимает много времени, а литий-ионные аккумуляторы не являются панацеей. Хотя я не отрицаю, что им легче управлять, и вам не нужны (дорогие) рулевые механизмы.
Ничего, что современные инверторы на порядок мощнее двигателей внутреннего сгорания при том же весе? А LiPo заряжается за 10 минут? И да, не существует классической конструкции двигателя внутреннего сгорания для резака для карт (лабораторные конструкции не в счет — они даже не летают в лабораториях).
Почему бы и нет? Только все гораздо сложнее. Двигатель, четыре вала на винтах, управление шагом с помощью управляющих колес вместо управления скоростью. Проблема будет заключаться в том, что вы не сможете просто получить набор стандартных деталей. По крайней мере, «раздаточную коробку» вам придется изобрести и построить самостоятельно.
Это обсуждение не относится к теме данной статьи, предлагаю перенести его на форум. По теме — попробуйте, а затем поделитесь своими выводами. Электродвигатели продаются в таких вариантах, которые приводятся в движение зубчатыми ремнями.
Привет KvadroLetchik, я бы хотел сам построить квадрокоптер, но для этого есть строгие требования: нужен квадрокоптер, который достаточно прочный, чтобы его не сдувало ветром, имеет радиус действия около 1 км, оснащен GPS и может использовать камеру с высоким качеством изображения.
Чертежей квадрокоптеров в истинном смысле слова не существует, да в них и нет необходимости. Сборка из модулей устраняет эту необходимость. С расходными материалами все немного сложнее. Чтобы собрать квадрокоптер своими руками, вам понадобятся:
Пошаговая инструкция по сборке
Предполагая, что вы прочитали нашу статью о выборе набора для сборки квадрокоптера и получили ценные советы — возьмите коробку с коллектором. Если нет, подключите кабели непосредственно к блоку управления.

Например, давайте рассмотрим сборку следующих компонентов:
- Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm.
- Бесщеточный двигатель DYS D2822-14 1450KV. 4 штуки
- DYS 30A 2-4S безщеточный ESC контроллер скорости Simonk прошивка
- DYS E-Prop 8×6 8060 SF ABS низкоскоростные лопасти пропеллера для RC самолетов
- Блок управления квадрокоптером KK2.1.5 kk21evo
- Литий-полимерный аккумулятор Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Зарядное устройство Hobby King Variable6S 50W 5A
- Разъем для аккумулятора XT60 штекер 12AWG 10 см с кабелем
- 20 пар банановых штекеров 3,5 мм Bullet Connector для батарей/моторов RC
- Пульт дистанционного управления квадрокоптером Spektrum DX6 V2 с приемником AR610 (в комплекте с передатчиком и приемником)
Равномерно разложите компоненты на столе и приступайте к работе.
Этап первый. Сборка
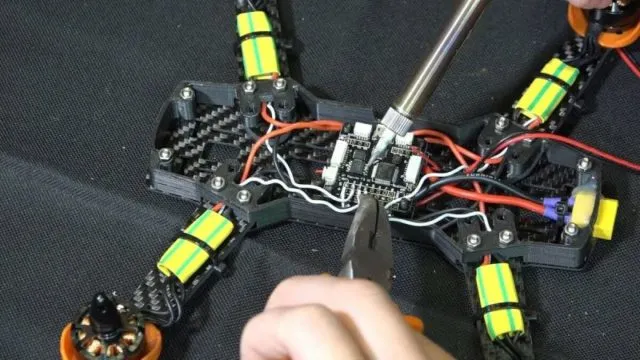
- Оцените необходимую длину кабелей управления, добавьте небольшой запас на мастерство и отрежьте до нужной длины.
- Припаяйте разъемы к выходам контроллера, чтобы облегчить последующее подключение двигателей.
- Приклейте контроллеры обратно на печатную плату.
- Припаяйте разъем батарейного блока к печатной плате.
- Прикрутите двигатели к режущим планкам. При установке двигателей следите за тем, чтобы не сорвалась резьба.
- Если вы не можете найти заглушки на моторах, припаяйте и их.
- Прикрутите планки с моторами к плате.
- Прикрепите блоки управления к спицам дрона. Что бы вы ни использовали, лучше всего использовать пластиковые кабельные стяжки.
- Подключите кабели блока управления к двигателям в любом порядке. При необходимости мы можем изменить их позже.
- Прикрепите блок управления к корпусу (предварительно сфотографируйте заднюю часть, это поможет). Вы можете приклеить его обратно, но я рекомендую пока использовать мягкую двустороннюю ленту.
- Подключите регуляторы скорости к контроллеру. Соединения, обозначенные (+ — пусто), обычно подключаются к монитору белым кабелем.
- Прикрепите приемник как можно ближе к контроллеру с помощью остатков ленты и подключите нужные каналы к нужным разъемам. Для понимания схемы подключения используйте документацию на приемник и фотографию на обратной стороне платы.
- Подключите устройство к аккумулятору с помощью разъема.
- Победа. Вы собрали свой квадрокоптер
Этап второй. Отладка

- Включите двигатели (обычно это происходит по-разному, поэтому снова обратитесь к документации).
- Немного приподнимите дроссельную заслонку и посмотрите, в какую сторону вращаются пропеллеры. Они должны поворачиваться, как указано на схеме, прилагаемой к регулятору. В противном случае управление будет обратным. Если что-то не так, просто поверните разъем, соединяющий двигатель с блоком управления.
- Если все вращается правильно, прикрутите верхнюю часть рамы. Не вдавливайте его в правильное положение. Если он тугой, значит, что-то пошло не так. Ослабьте нижние винты и равномерно затяните их, когда они будут установлены на место.
- Вставьте батарейный блок.
- Прикрепите адаптеры пропеллеров к двигателям.
- Установите пропеллеры, обращая внимание на направление вращения двигателей. Приподнятая часть лезвия должна быть направлена в сторону вращения.
- Вот и все, ваш вертолет готов к первому запуску!
Заключение
Наконец, я хотел бы добавить к этому тексту определенную мораль. Любая подобная деятельность, будь то строительство или сборка, является мощным образовательным инструментом. Главное — начать. Вы начнете понимать многие тонкости и научитесь концентрироваться на важных моментах. Это относится не только к сборке вертолетов.
Вам нужно научиться искать информацию, гуглить и понимать многие вещи. Они не принесут вам пользы в жизни, но и не ослабят ваш интеллект. Будьте смелыми, учитесь, развивайтесь и не бойтесь экспериментировать!
Кстати, дайте нам знать, что вы думаете об этой теме в комментариях. Вы также можете подписаться на наши группы (кнопки ниже), это не проблема для вас, это удовольствие для меня. Удачи вам, пилоты, и да пребудет с вами сила подъема.
В каждой из опор рамы должен быть установлен мощный, компактный двигатель. Их можно прикрепить с помощью горячего клея или ниток. Винты прикреплены к верхней части двигателей. Лопасти для квадрокоптера обычно не изготавливаются самостоятельно — для этого необходимо использовать фрезерный станок. Купить готовые пропеллеры гораздо проще и практичнее.
Необходимые детали
Чтобы собрать высокоэффективный самодельный вертолет для дальних полетов с нуля, вам понадобится ряд компонентов. К ним относятся:
- Рама и материалы для сборки,
- пропеллеры,
- пульт дистанционного управления и приемник сигнала дистанционного управления,
- двигатель,
- камера,
- контроллер,
- регуляторы скорости,
- набор вспомогательных компонентов,
- схему самого квадрокоптера.




Рама и ее комплектующие
Для того чтобы наш дрон надежно летал, его рама должна быть максимально устойчивой и качественной. Многое еще зависит от того, для каких целей он будет использоваться. Если речь идет о дроне грузоподъемностью 200 кг, рама должна быть как можно более прочной и изготовленной из подходящих материалов. Если это простой спортивный квадрокоптер, вы можете уменьшить его вес.


Однако если вы хотите построить большой гибридный дрон, который можно использовать, например, для съемок, но при этом превратить в грузовик, то для рамы следует выбрать другие материалы.
Есть два способа решения этой проблемы:
- Выбор в пользу сборного каркаса,
- Постройте собственную базу для квадрокоптера.
Опять же, есть разные нюансы. Если вы покупаете готовое решение, в большинстве случаев к раме легко прикрутить другие необходимые детали, и дрон можно запускать. Однако если конкретная деталь повреждена в результате падения или небрежного использования и требует замены, вам придется подождать, пока вы закажете доставку и замену детали.

Если вы собираете раму вручную из материалов, которые вы сделали сами, вы должны аккуратно вырезать необходимые детали и соединить их вместе. Если случится что-то непредвиденное, неисправную деталь можно просто заменить на новую.

Поскольку многие люди предпочитают раму, которую они могут собрать сами, пластиковые трубы — лучший способ ее изготовления. Они широко используются при производстве кабельных каналов. Свойства этих трубок идеально подходят для монтажа всех необходимых компонентов управления и двигателей.
Сборка
Ниже приведены подробные инструкции по сборке.
- Сначала рассчитайте приблизительную длину необходимых вам кабелей управления и добавьте небольшой запас, затем обрежьте их до нужной длины.
- Теперь необходимо подключить штекеры к выходам контроллера, чтобы впоследствии можно было легче подключить двигатель.
- Припаяйте контроллер к пластине распределителя.
- Припаяйте разъем батарейного блока к вышеупомянутой плате.
- Теперь установите двигатели на четыре стержня квадрокоптера. Будьте очень внимательны при монтаже, чтобы случайно не деформировать резьбу.
- Если двигатели не имеют креплений, припаяйте и их.
- Поместите бруски с моторами на доску.
- Следующий шаг — установка контроллеров на четырехсторонние стойки. Лучше всего это сделать с помощью пластиковых зажимов.
- Теперь кабели контроллера подключены к двигателям. Это можно делать в любом порядке. При необходимости соединение можно восстановить после этого.
- Подсоедините блок управления к корпусу. Лучше всего использовать мягкую двустороннюю клейкую ленту.
- Подключите вращающиеся регуляторы к контроллеру на клеммах с маркировкой «+», белый кабель должен быть подключен к монитору.
- Припаяйте приемник рядом с контроллером и подключите нужные каналы к разъемам. Важно знать, какой кабель для чего предназначен, чтобы не запутаться.
- Подключите аккумулятор к вертолету через разъем.
Настройка
Теперь вам нужно настроить квадрокоптер так, чтобы он не разбился и не вышел из строя во время первого полета.
- Сначала необходимо запустить двигатели. Это может быть по-разному, поэтому лучше всего сначала прочитать документацию к двигателям.
- Нажмите на педаль газа и наблюдайте за тем, как вращаются пропеллеры. Они должны поворачиваться точно в соответствии со схемой, прилагаемой к блоку управления. Если они вращаются в противоположном направлении, это означает, что управление обратное. Если что-то работает не так, как хотелось бы, необходимо изменить направление движения, соединяющее двигатель с блоком управления.
- Если все работает так, как нужно, верхняя часть рамы должна быть плотно прикручена. Будьте очень осторожны и не пытайтесь оттолкнуть его. Если он слишком тугой, следите за кронштейнами, ослабьте винты снизу, а затем аккуратно затяните их.
- Прикрепите батарейный отсек, установите адаптеры пропеллеров на двигатели.
- Установите пропеллеры, обращая внимание на сторону вращения. Приподнятая часть лезвия должна быть направлена в сторону вращения.


На этом настройка дрона завершена, и квадрокоптер готов к первому полету.
Если вы собираете раму вручную из материалов, которые вы сделали сами, вы должны аккуратно вырезать необходимые детали и соединить их вместе. Если случится что-то непредвиденное, неисправную деталь можно просто заменить на новую.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально построить своими руками не только примитивный дрон, но и профессиональный квадрокоптер. Для этого необходимо приобрести основные компоненты — батареи, контроллер полета, моторы, кабели и пульт дистанционного управления. Вам также понадобится фотоаппарат — компактный и легкий, но с хорошим разрешением.
Сборка рамы
Бумажные и картонные каркасы для вертолета с камерой не подходят, конструкция будет слишком тяжелой. При желании вы можете заказать готовое крепление для дрона в интернете. Но его очень легко собрать своими руками, например, из пластиковых водопроводных труб или легких алюминиевых профилей. Детали соединяются между собой с помощью винтов или фурнитуры. Ножки, на которых будет стоять дрон, можно прикрутить к концам спиц рамы снизу.

Алюминиевая рама очень легкая и в то же время очень устойчивая.
Установка моторов
В каждой из опор рамы должен быть установлен мощный, компактный двигатель. Их можно прикрепить с помощью горячего клея или ниток. Винты прикреплены к верхней части двигателей. Лопасти для квадрокоптера обычно не изготавливаются самостоятельно — для этого необходимо использовать фрезерный станок. Купить готовые пропеллеры гораздо проще и практичнее.
Для дрона с камерой лучше использовать пропеллеры с двумя лопастями — так меньше вибраций.
Сборка электроники
В средней части автомобиля находится панель управления. Лучше закрепить его с помощью горячего клея. Двусторонний скотч реже используется для громоздких конструкций, так как не обеспечивает надежного сцепления.
Контроллер для дрона с камерой следует выбирать подороже, с датчиками и функциями полета.
Установка камеры
Чтобы собрать летающий дрон своими руками, лучше всего использовать GoPro — легкую и небольшую экшн-камеру. Сделайте специальную пенопластовую платформу в верхней или нижней части рамы, чтобы гасить колебания тела во время полета. Камера должна быть надежно закреплена с помощью резинок.
Камера дрона может быть размещена в любом месте с хорошей видимостью и минимальной вибрацией.
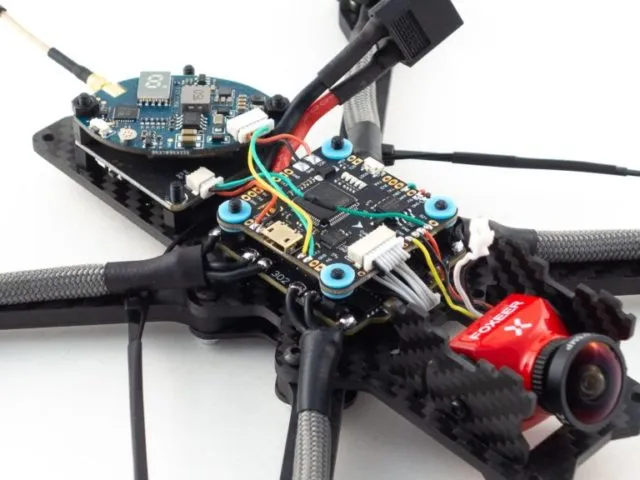
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для ручной видеосъемки почти готов. Теперь осталось только подключить регуляторы скорости к двигателям и регулятору и подключить плату управления к батареям. Вам также нужно не забыть подключить камеру к полетному чипу.

Двигатели дрона с камерой должны создавать подъемную силу, превышающую вес дрона.
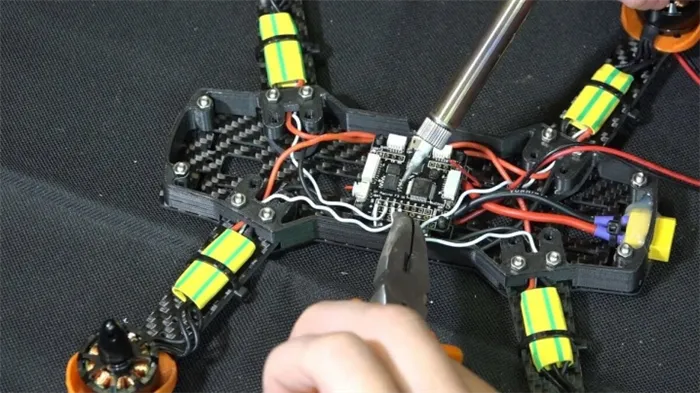
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона мало чем отличается от сборки обычного квадрокоптера. Разница заключается в выборе компонентов — особое внимание следует уделить двигателям, раме и пропеллерам.
В случае с гоночным дроном лучше приобрести готовую базу. Это обеспечит оптимальную балансировку машины. Легкая и прочная рама из углеродного волокна с четырьмя стандартными спицами — хороший выбор для сборки.
Сборка моторной части
Двигатели для гоночного коптера крепятся к спицам рамы с помощью винтов в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подходят 2205-2600 КВ. Контроллеры скорости установлены в средней части стоек и подключены к двигателям. Для сборки гоночного дрона можно выбрать пропеллеры с двумя или тремя лопастями — первый обеспечивает большую скорость, а второй облегчает маневрирование.
Регулировка поворотов необходима для гоночного вертолета, иначе он не будет маневренным.
Установка электронной части
Панель управления крепится к центральной пластине шасси, как обычно. Его можно посадить с помощью горячего клея или просверлить отверстия и закрепить маленькими шурупами. В последнем случае конструкция после сборки становится более надежной. К раме прикреплен приемник сигналов, который передает команды на плату управления. Батарея традиционно крепится к нижней части устройства, отдельно от микрочипа.
Камера гоночного дрона устанавливается в специальный паз в готовой раме.
Подсоединение проводов
Последним этапом сборки является подключение кабелей, идущих от камеры и двигателей, к плате управления. Сам микрочип подключен к батарее.
Прикрепляя кабели, убедитесь, что они не прикреплены к крыльям дрона.
Как сделать квадрокоптер для человека своими руками
Человеческий беспилотник пока что является крайне редким, небезопасным и дорогим вариантом для самостоятельной сборки. До сих пор нет общедоступных инструкций о том, как построить квадрокоптер с большим подъемом в домашних условиях, поскольку владельцев таких устройств очень мало.
Однако можно описать краткий алгоритм построения беспилотного подъемника на основе стандартной системы.
Для установки самодельного большого квадрокоптера подходит только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не способны выдержать всю электронику и владельца дрона.

Винты, используемые для крепления частей рамы, должны быть рассчитаны на нагрузку более 100 кг.
Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на опоры силовой рамы. Особое внимание следует обратить на их мощность — общая тяга должна быть не менее 120 кг. Достичь этого реально с помощью восьми двигателей для преобразователя мощностью 3 кВт каждый. Двигатели должны быть оснащены регуляторами не менее 80 A. При сборке компоненты соединяются между собой кабелями и крепятся к раме исключительно прочными винтами.

Для мощного беспилотного летательного аппарата лучше использовать двигатели средней мощности с меньшим весом без нагрузки.
ёСборка системы управления
Процессорная плата человеческого квадрокоптера должна поддерживать управление скоростью вращения пропеллера, стабилизацию и изменение направления. Он, как и во всех случаях, установлен на средней платформе, закреплен винтами в отверстиях и соединен с моторной частью и приемником сигналов.
Для питания вертолета необходимо одновременно несколько аккумуляторов, которые должны иметь максимальную емкость. Аккумулятор должен питать восемь эффективных двигателей и удерживать дрон в воздухе не менее десяти минут. Чтобы не делать конструкцию слишком громоздкой, проще закрепить батареи в съемной сумке, которую пользователь может носить на спине.

Дрон управляется оператором с помощью простого ручного пульта дистанционного управления.
Для беспилотника-человека не требуются посадочные опоры. Однако следует предусмотреть надежные ремни, непосредственно отвечающие за фиксацию оператора.
Предупреждение. Создание квадрокоптера для человека стоит довольно дорого. Цена составляет несколько десятков тысяч рублей, и большая часть денег пойдет на покупку двигателей и батарей.







